I saw Jenny List’s post on Mastodon the other day:
I need a small server to do a thing.
I totted up the price of a Raspberry Pi 5 with all the accessories I would need, and came up at more cash than an equivalent x86 box.
I’m sorry to say this, but there’s no reason for me to use a Pi there.
along with Jonty Wareing’s reply:
… Other than hats or pins I find there is rarely a good reason for a pi these days. You can get cheap x86 thin clients that beat the pants off them – the dell wyse ones are very cheap on ebay and excellent, the 5070 has an m2 slot and upgradable ram.
I’ve had Raspberry Pis since they were launched. I used to work for an Official Reseller. I’ve been hired for my expertise with them. They’re so much part of the woodwork around here that I’ve never really considered them expensive. So how do they compare to an ex-corporate thin client box?
Dell Wyse 5070
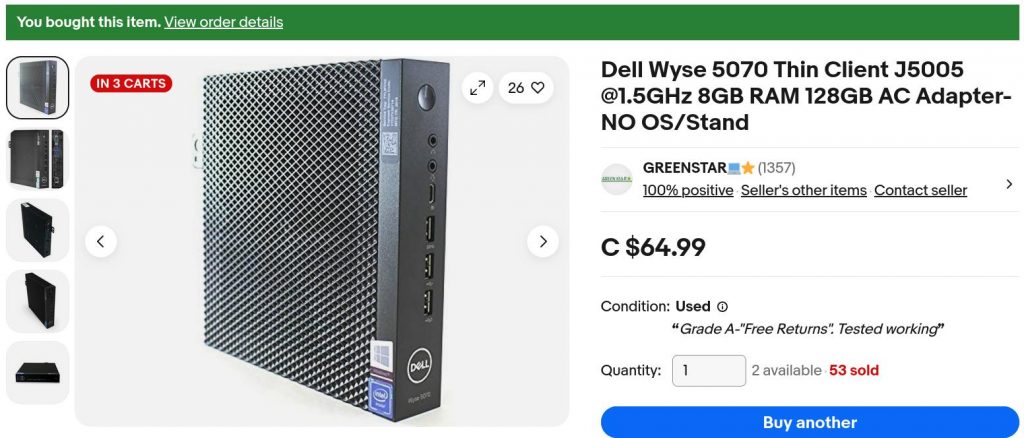
I found one on eBay from a local reseller, GREENSTAR💻⭐. For $68.44 including sales tax (that’s €42), I got a used thin client box including:
- a great big power supply brick;
- Intel j5005 quad core cpu, fanless;
- 8 GB of DDR4 RAM (dated 2021);
- 128 GB SATA M.2 SSD;
- 3× DisplayPort video ports, 1920×1080 at 60 Hz;
- 5× USB 3 ports, 1× USB C port and 2× USB 2 ports;
- a real 9-pin serial port;
- no wifi!
This isn’t a detailed hardware review: for those, I suggest you read Gough Lui and David Parkinson. To get this machine up to a usable spec, I added:
- a DisplayPort → HDMI cable (about $20);
- a replacement BIOS backup battery ($1);
- a cheap USB wifi adapter. I’m still finding old RTL8188CUS dongles about the house from the early Raspberry Pi days, some still in original packaging. These work, but aren’t great, but I can’t beat the price.
All in — excluding monitor, keyboard and mouse — I’ll say I brought it in for $100 inclusive (about €61).
Raspberry Pi 5
To come up with an equivalent system (bought from an Official Reseller that I didn’t work for) I’d need:
| Description | Price |
|---|---|
| Raspberry Pi 5 8GB | $114.95 |
| Raspberry Pi 45W USB-C Power Supply | $21.99 |
| Case (with fan) | $13.95 |
| MicroHDMI to HDMI Cable (2 m) | $9.95 |
| 128GB SD Card | $24.95 |
| RTC Battery | $7.00 |
| Subtotal | $192.79 |
| Sales Tax | $25.06 |
| Total | $217.85 |
(or €134)
Not all of these items are available from the one reseller, particularly the 128 GB SD Card and RTC battery. I’ve included the RTC battery so you can do timed power-on tricks as with a regular PC. All the parts are from Raspberry Pi themselves. Curiously, you can pay more for non-official accessories with the CanaKit Raspberry Pi 5 Starter Kit at $224.95 + tax.
Raspberry Pi 4
An equivalent 8 GB Raspberry Pi 4 system breaks down like this:
| Description | Price |
|---|---|
| Raspberry Pi 4 8GB | $104.95 |
| Raspberry Pi 15W USB-C Power Supply | $10.95 |
| Case | $6.95 |
| Case fan | $6.75 |
| MicroHDMI to HDMI Cable (2 m) | $9.95 |
| 128GB SD Card | $24.95 |
| DS3231 Real Time Clock Module for Raspberry Pi | $9.95 |
| Subtotal | $174.45 |
| Sales Tax | $22.68 |
| Total | $197.13 |
(or €121.)
This is surprisingly expensive, and unless you must have this particular SoC, likely better to go with a Raspberry Pi 5. Again, the RTC is optional, but timed power-on can be handy in a small computer. Most of the “RTC for Pi” boards use a cheaper DS3231M clock chip which can’t issue alarms for power control. You might have to shop around a bit to get this particular part.
For roughly $2 more, you could go for the official Raspberry Pi 4 Desktop Kit (tiny 16 GB SD card, two HDMI cables, guidebook, no fan, no RTC — but includes the surprisingly lovely Raspberry Pi Keyboard and Hub and Mouse). For a whole lot more ($259.95), you could go with the CanaKit Raspberry Pi 4 EXTREME Kit.
(As a former employee of a reseller, I suspect I’m permanently blocked from sharing why official resellers bundle third-party bits with their kits, always with a considerable price bump. Let’s just say that, during the Pandemic Chip Shortage, it was very galling to get a rare shipment of Raspberry Pi boards, go to extreme lengths to cancel multiple orders [oh the javascript injection hack attempts that I saw] and hurry to ship the boards out. The next day, we’d see what had to be the same hardware appearing on eBay at a 300% markup. And there was nothing we could do about it …)
Testing
I’m not interested in testing:
- Network throughput — Beyond having a working connection, I don’t have the skill or attention span to test networking stuff
- Video performance — I don’t really do video things. Raspberry Pis and thin clients are going to struggle with full screen 60 fps video anyway, and optimizing this is not my jam
- Power consumption — I don’t have the right kit for this. All I have is a 20 year old Kill-a-Watt clone which doesn’t have the necessary resolution.
I’m going to have to rely on benchmarks. Benchmark results are notoriously easy to fiddle and give only a rough idea of how a system will perform in real life. I’m going to present the results of three systems (Raspberry Pi 4 and 5, Dell Wyse 5070: all running stock but up-to-date Raspberry Pi OS or Debian) in three tests, in decreasing order of arbitrariness.
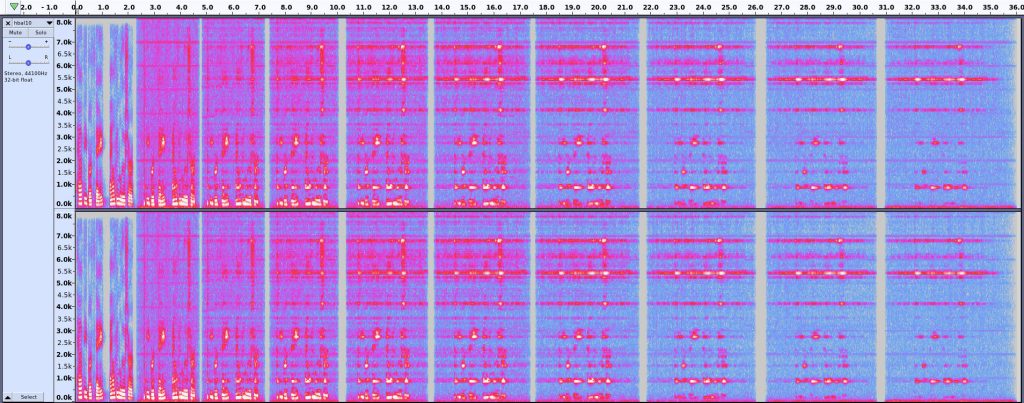
1: MP3 Encoding
The time, in seconds, to encode Aphex Twin’s minimalist opus aisatsana [102] (5′ 21″) from a 55MB WAV file to a 6.8MB MP3 with:
time lame -V 2 aphex_twin-aisatsana.wav
| System | Time |
|---|---|
| Raspberry Pi 4 | 14.2 s |
| Dell Wyse 5070 | 8.6 s |
| Raspberry Pi 5 | 5.7 s |
The thin client comes out between the two Raspberry Pis. It’s not a bad result at all: 8.6 s is still 37× real-time encoding.
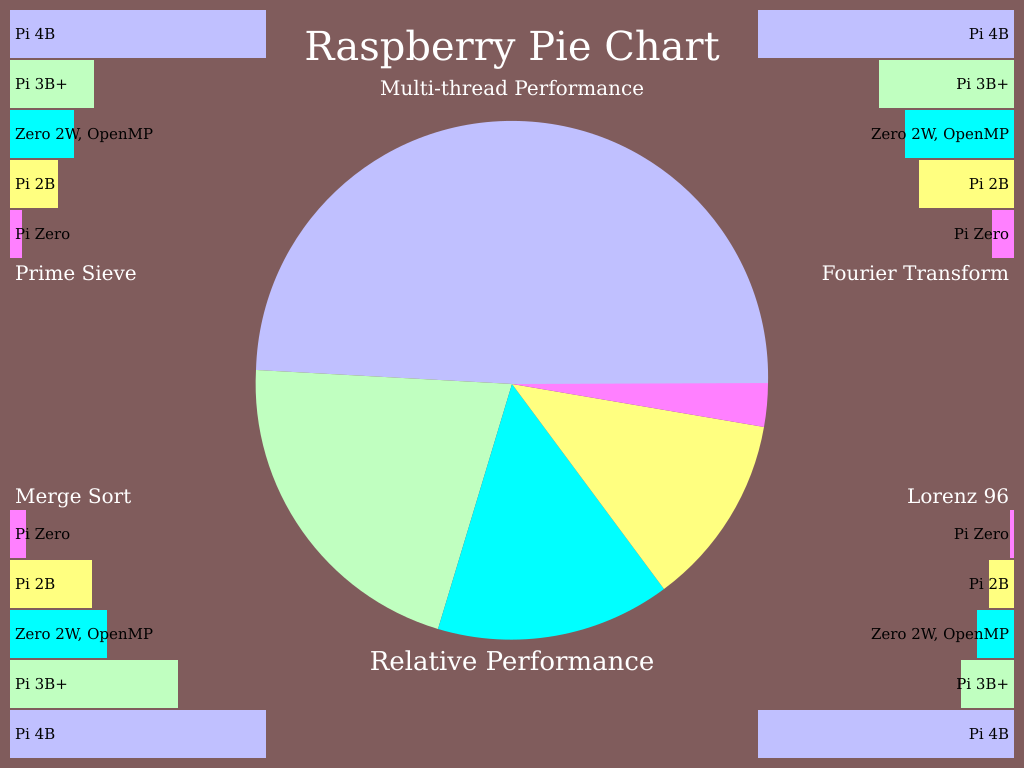
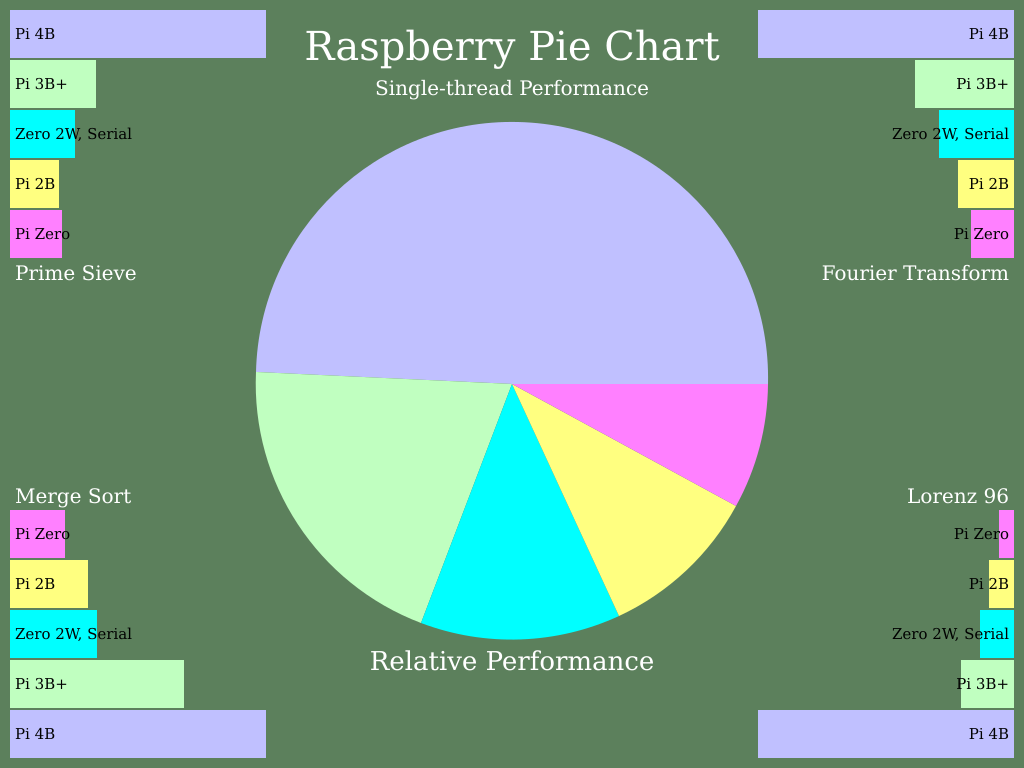
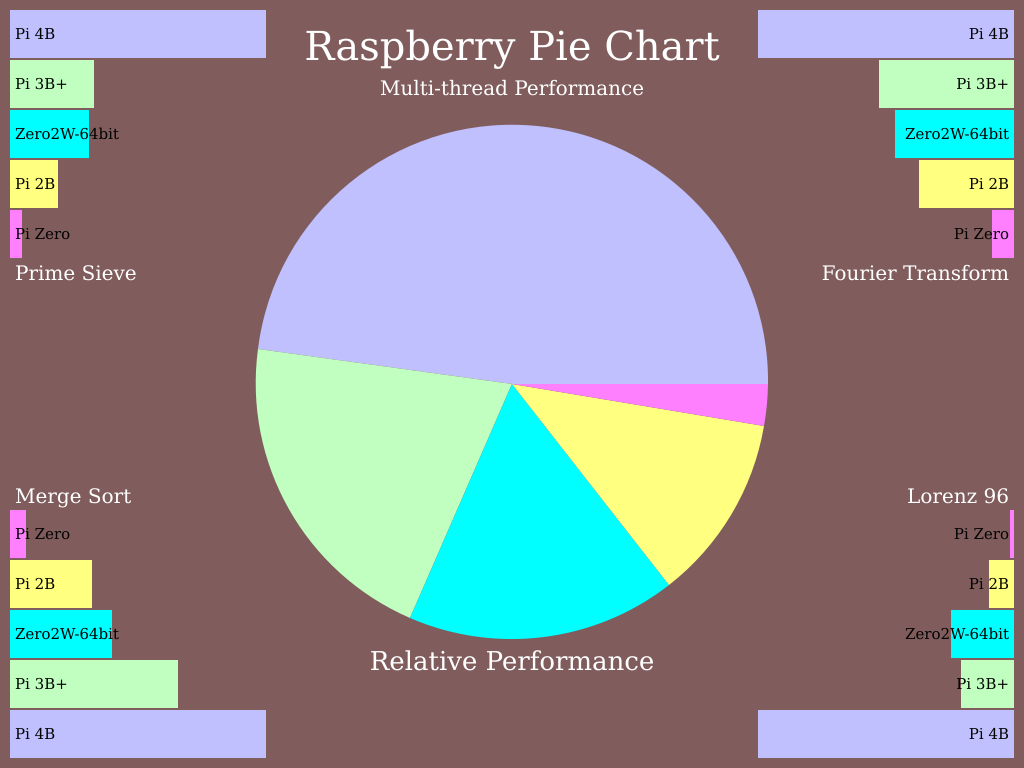
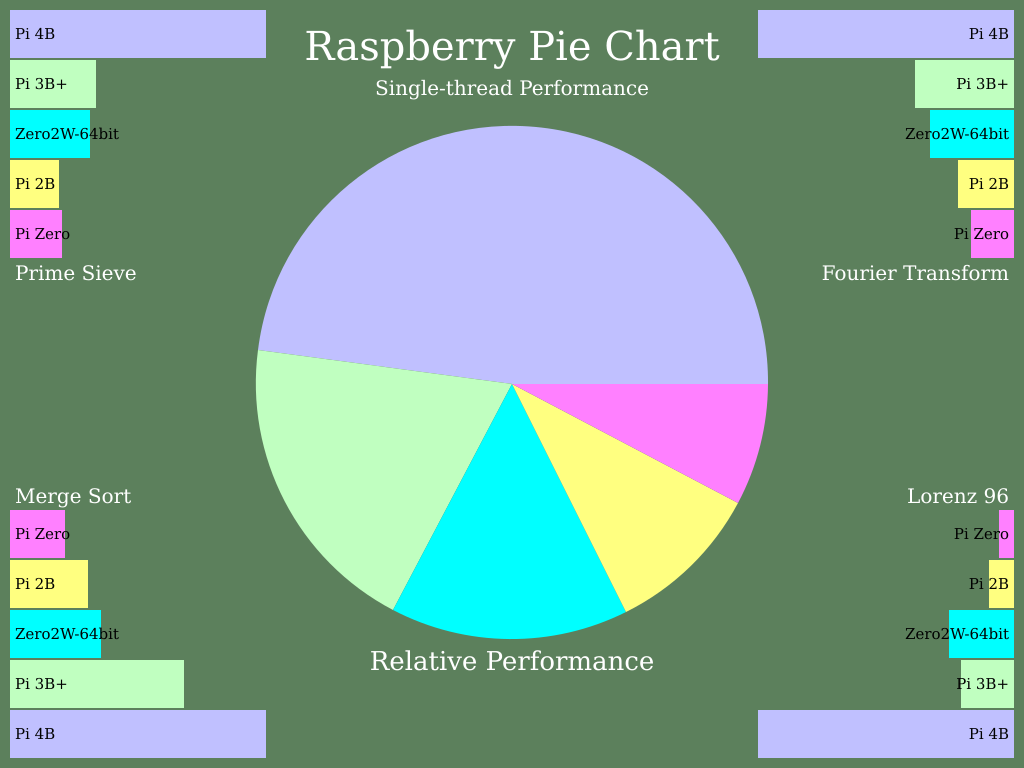
2: pichart
pichart is a processor benchmark developed by Eric Olson for ranking numeric processing power of various computers against Raspberry Pi boards. It’s documented here: A Pi Pie Chart.
It’s possible to tweak this benchmark endlessly with compiler options, but I stuck with whatever version of gcc the system came with. I also used exceptionally conservative compiler options of -O2. I reckon that if your compiler has got to version 12, it won’t be producing terrible code with simple options. Anyway:
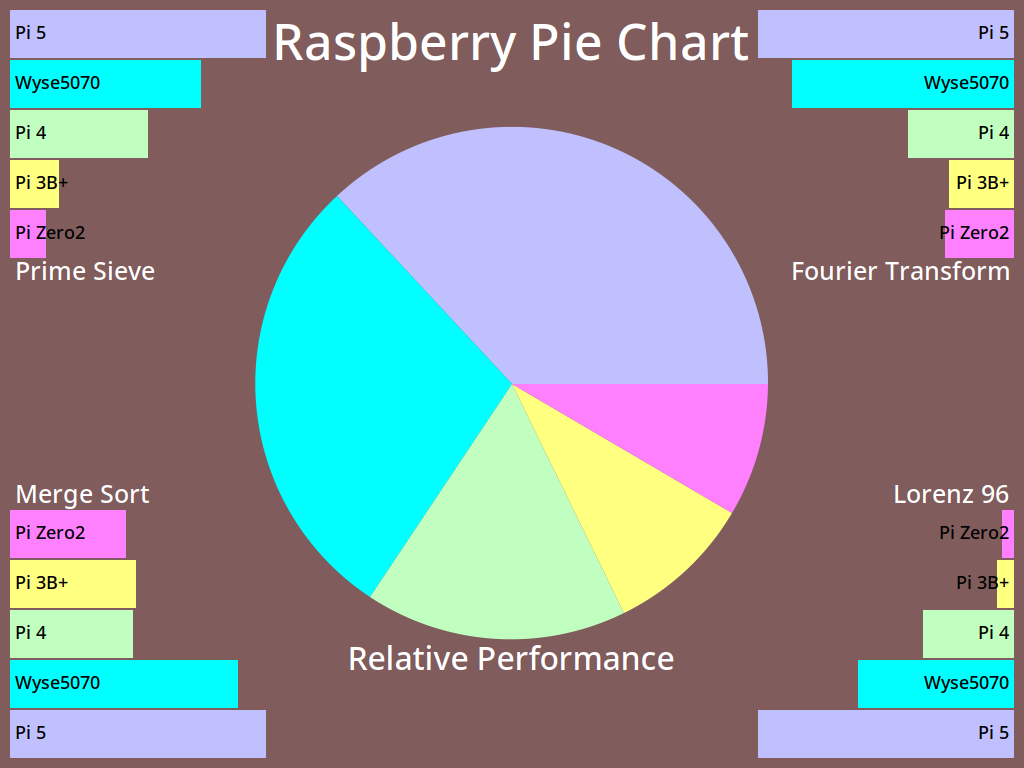
(raw results, if you must: Wyse5070-vs-Pi.txt)
All of these are OpenMP multi-core, multi-thread results. The Wyse 5070 holds a pretty solid second place to the Raspberry Pi 5.
3: UnixBench 6.0.0
byte-unixbench must be a very serious benchmark because it wraps a whole suite of results into one impenetrable number. We’re supposed to believe that This Number has some respectable heft. It certainly takes a long time to run (almost half an hour) and if your computer has fans, things can get loud.
Since all three machines have four cores, it’ll save a lot of words to report only the multi-core System Benchmarks Index Score:
- Raspberry Pi 4: 1473.2 (detailed results)
- Dell Wyse 5070: 1294.8 (detailed results)
- Raspberry Pi 5: 3974.6 (detailed results)
For all its purported repeatability, this set of scores surprised me most. The Wyse 5070 doesn’t feel much slower than either Raspberry Pi board. Could the small SATA SSD be a bottleneck? I’d have to spend money to find out.
(I also ran sbc-bench, but the results are even less enlightening. The only thing I could discern was that the Wyse 5070 was running some kind of custom thermal regime. Since it has no fan and only a modest heat-pipe cooler, this is no surprise. My results, have at ’em: sbc-bench)
Conclusions
I can get two Wyse 5070 systems for the cost of one Raspberry Pi 4 or 5. This is what makes the decision for me, and every other issue is window dressing. So much of “I made a thing with a Raspberry Pi!” is really “I made a thing with a small Linux computer!” these days, and the 5070 and other thin clients excel at this.
Yes, the Raspberry Pi 5 is likely to be slightly faster that the Wyse 5070. And if you’re locked-in to their cameras, HATs or GPIO layout, you’re probably going to stick with Raspberry Pi. Likewise, if you’re kitting out a classroom, Raspberry Pis are all repeatable, from the same vendor, and have a proper warranty. Nobody in education got fired for buying Raspberry Pi — even if the micro:bit is the STEM board of choice round these parts.
Even if the supply can be a bit variable, and you can’t be quite sure you’ll be able to get the same spec every time, the Wyse 5070 represents great value for money. I’ll definitely think twice about buying a Raspberry Pi next time.
… about those GPIO pins
If you’re not constrained to using Raspberry Pi’s 40-pin header or specific HAT hardware, you’ve still got options, including but not limited to:
- an FT232H Breakout and PyFtdi. It may be possible (with some fiddling) to make the FT232H appear as a Linux gpio chip directly;
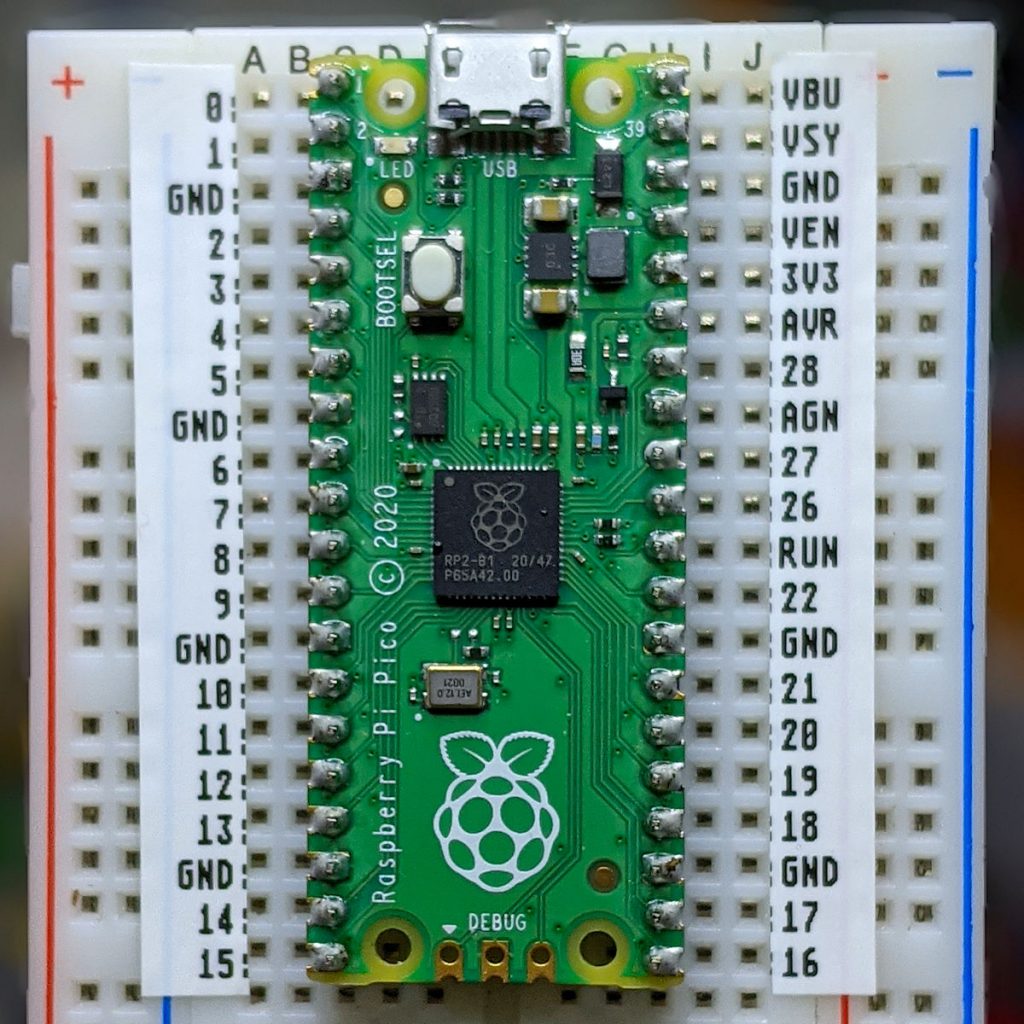
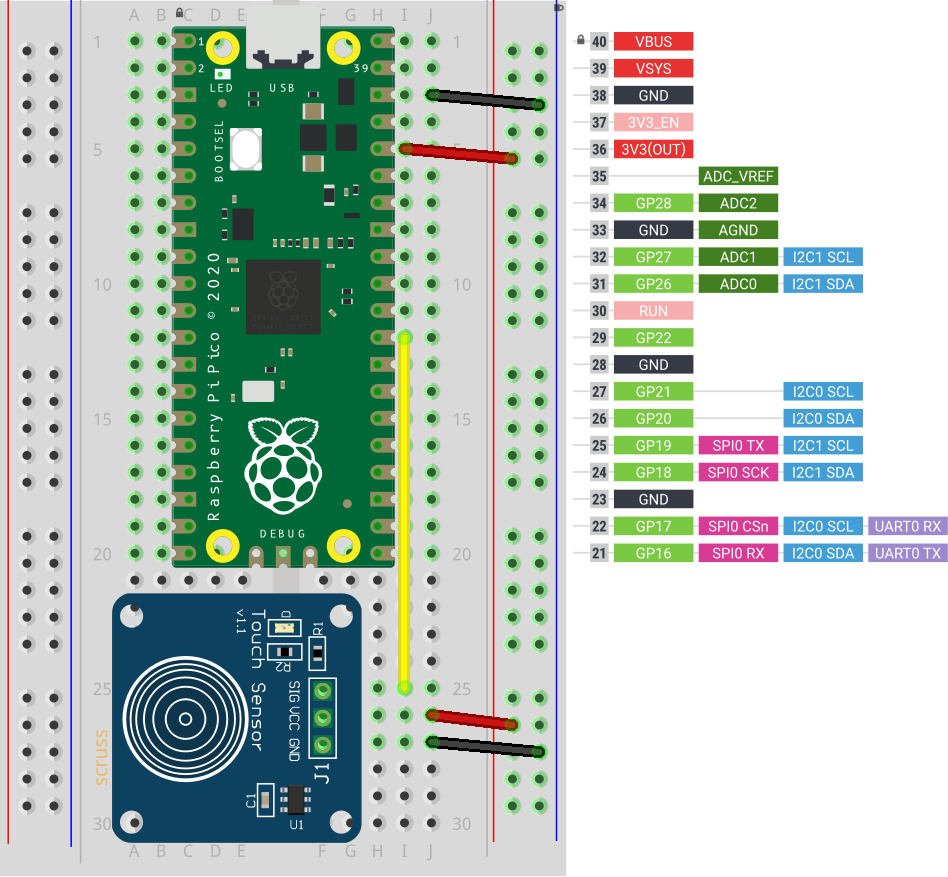
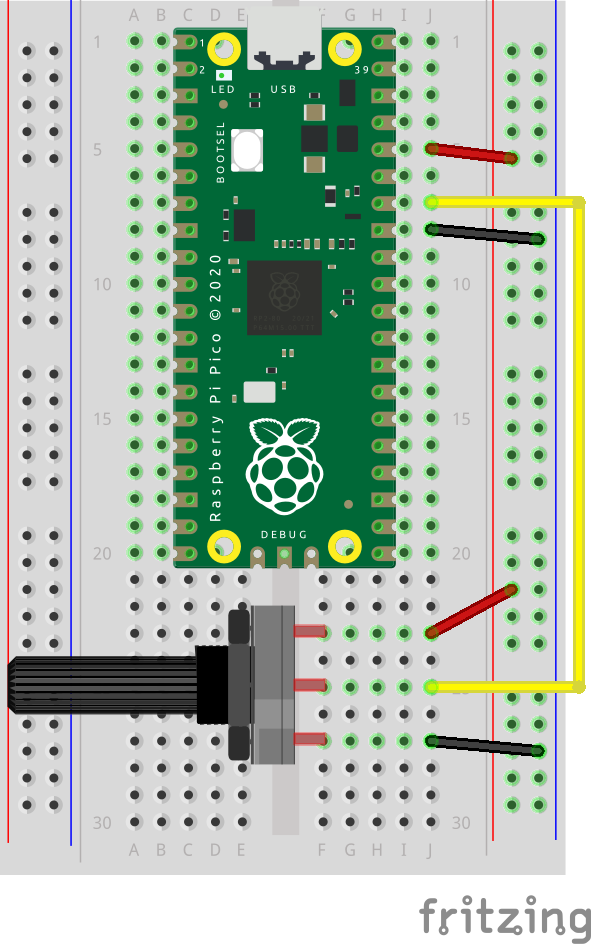
- u2if (USB to interfaces) running on a Raspberry Pi Pico, talking to Python on the Linux end;
- and of course, Firmata running on an Arduino is exactly where you left it in 2011. It still works, it hasn’t gone away, and is still at the heart of many custom interactive installations.
Parting thought
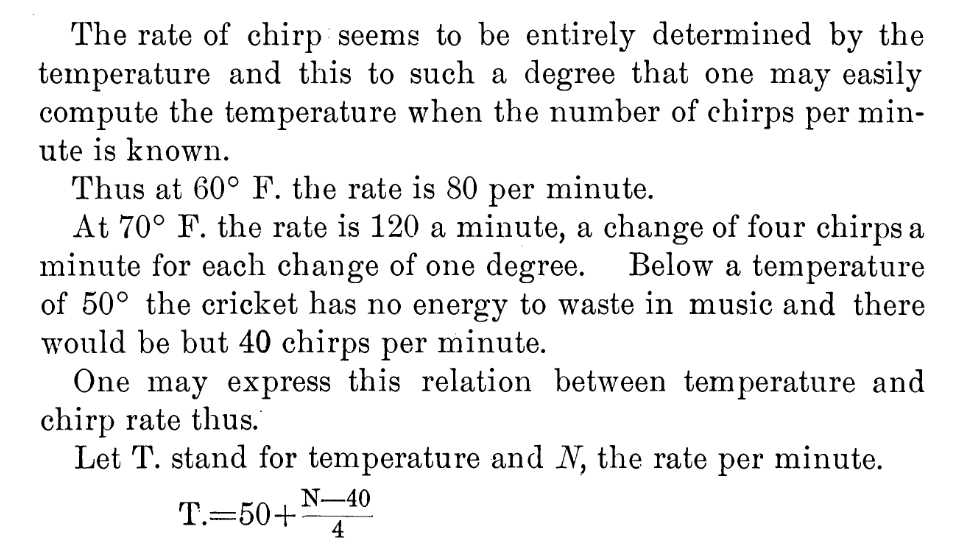
“raspberry pi computer” is an anagram of “temporary price burps”. This, I feel, is important for you to know.