My NanoLeaf NanoLight LED bulb from 2013 finally gave up the ghost: or did it …?
woo! spooky glowing undead lightbulb!
The LEDs glowed for several minutes after removing it from the socket. I suspect capacitance is afoot.
Although it was absurdly expensive ($45 [USD?]; that’s about $62 with inflation) when I got it from the original Kickstarter campaign in 2013, it has been run for several hours a day since then. I always liked the shape of the bulb, with its origami-like folds.
Modern LED bulbs are much cheaper, but this one looks classy. The magic smoke has well and truly gone, and all that’s left is a faint glow and the stench of rancid phenolic.
In late 2024, SparkFun Electronics relaunched their website. In doing so, they deleted roughly 20 years of archived product information, along with all associated datasheets, schematics and tutorials. Luckily, the Internet Archive’s Wayback Machine has good records of the site, and I was able to recover links to 5934 deleted products.
Plug in the CH552 board. You may have to do something with the boot/reset button to make it turn up as the right USB ID (4348:55e0 WinChipHead).
Program the board: sudo ch55xisptool basic52s.bin
Disconnect the board, and wire it up to the USB UART (5 V, GND, TX → RXD [P3.0], RX → TXD [P3.1])
Hit return a few times to get a prompt
PWM is on P1.2, INT1 is on P3.3. See Hackaday project to see how to access I²C, and also do things with SFR values using RDSFR / WRSFR. PORT3 is at SFR(0B0H)
please ignore the following for now …
Who wouldn’t want to run a solid BASIC interpreter on a $3 development board? So maybe there are a couple of drawbacks:
there’s no way to save the program to non-volatile storage: you have to be connected through a serial terminal at all times; and
you’ve got about 600 bytes for the whole program, with no way to expand it.
Despite these limitations, there’s some futile fun to be had. I’ll show you how to flash BASIC-52 onto one of these development boards, and give a quick intro to what you can do with it.
BASIC-52
Intel released the first version of BASIC-52 for their 8051 family of microcontrollers in 1984. They produced a chip (8052AH-BASIC) with the interpreter burnt into mask ROM in 1985. The source code was released into the public domain, and various features such as I²C support were added by the community around 2000.
As befits an embedded language, BASIC-52 supports pin management, timers and interrupts. It’s also a fairly full-featured BASIC interpreter with floating point support and mostly familiar keywords and functions. Because it’s designed for very limited memory use, its string handling is quite unlike any other BASIC dialect. It has one character array that you can treat as a string, and a few functions to work with characters, but that’s about all.
Deqing Sun’s CH552 Stick, from the ch55xduino project
You might know WCH (aka QinHeng Electronics) from their inexpensive CH341 USB serial adapters and other interface boards. What you might not realize is that all of their older interface chips are based on an optimized 8051 design
also known as “Monster BASICS Sound reactive RGB+IC Color Flow LED strip”. It’s $5 or so at Dollarama, and includes a USB cable for power and a remote control. It’s two metres long and includes 60 RGB LEDs. Are these really super-cheap NeoPixel clones?
I’m going to keep the USB power so I can power it from a power bank, but otherwise convert it to a string of smart LEDs. We lose the remote control capability.
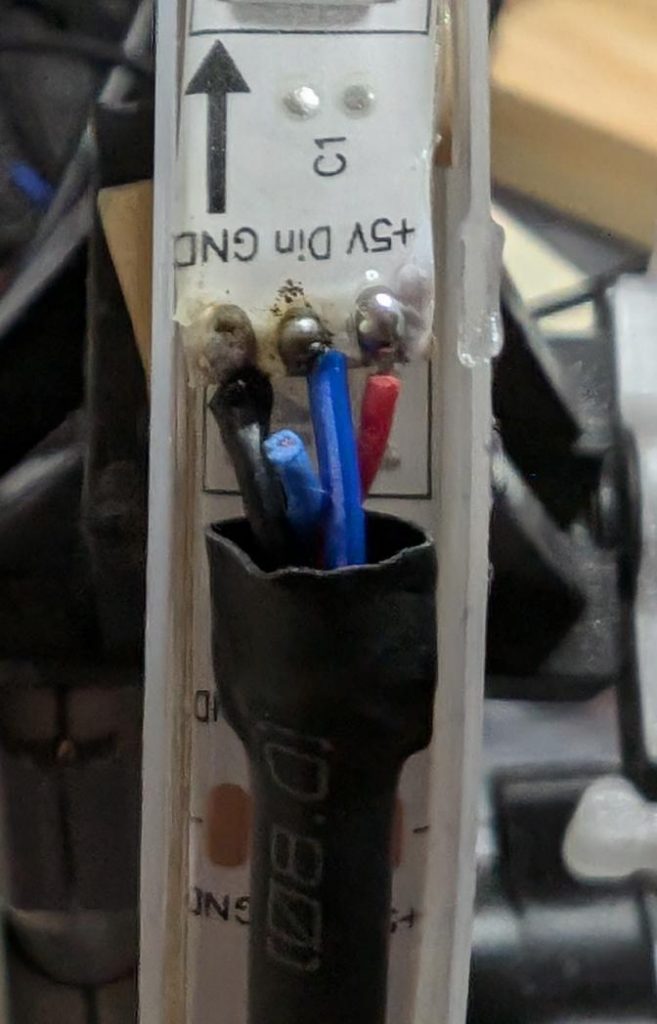
Pull back the heatshrink at the USB end:
… and there are our connectors. We want to disconnect the blue Din (Data In) line from the built in controller, and solder new wires to Din and GND to run from a microcontroller board.
Maybe not the best solder job, but there are new wires feeding through the heatshrink and soldered onto the strip.
Here’s the heatshrink pushed back, and everything secured with a cable tie.
Now to feed it from standard MicroPython NeoPixel code, suitably jazzed up for 60 pixels.
It’s mid-February in Toronto: -10 °C and snowy. The memory of chirping summer fields is dim. But in my heart there is always a cricket-loud meadow.
Short of moving somewhere warmer, I’m going to have to make my own midwinter crickets. I have micro-controllers and tiny speakers: how hard can this be?
more fun than a bucket of simulated crickets (video description: a plastic box containing three USB power banks, each with USB cable leading to a Raspberry Pi Pico board. Each board has a small electromagnetic speaker attached between ground and a data pin)
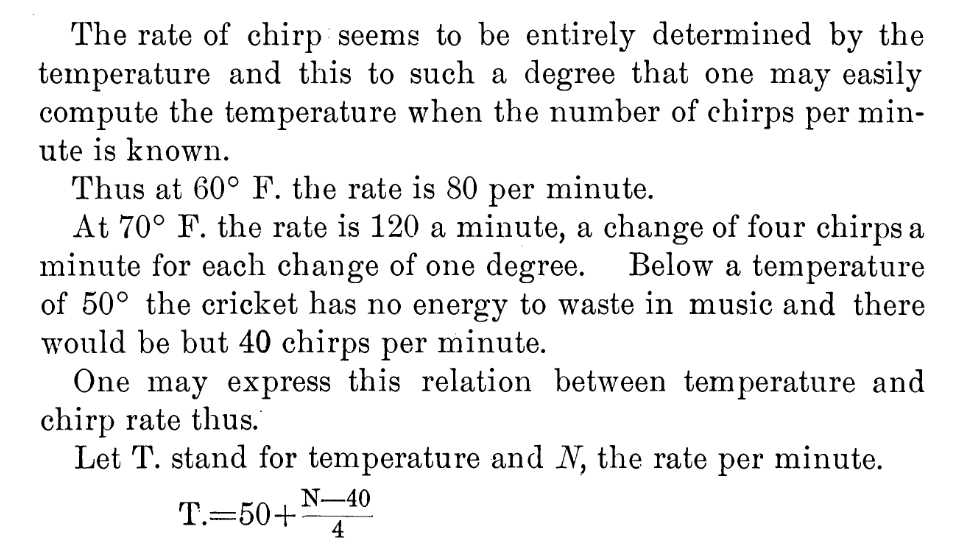
I could have merely made these beep away at a fixed rate, but I know that real crickets tend to chirp faster as the day grows warmer. This relationship is frequently referred to as Dolbear’s law. The American inventor Amos Dolbear published his observation (without data or species identification) in The American Naturalist in 1897: The Cricket as a Thermometer —
pretty bold assertions there without data eh, Amos old son …?
When emulating crickets I’m less interested in the rate of chirps per minute, but rather in the period between chirps. I could also care entirely less about barbarian units, so I reformulated it in °C (t) and milliseconds (p):
t = ⅑ × (40 + 75000 ÷ p)
Since I know that the micro-controller has an internal temperature sensor, I’m particularly interested in the inverse relationship:
p = 15000 ÷ (9 * t ÷ 5 – 8)
I can check this against one of Dolbear’s observations for 70°F (= 21⅑ °C, or 190/9) and 120 chirps / minute (= 2 Hz, or a period of 500 ms):
Now I’ve got the timing worked out, how about the chirp sound. From a couple of recordings of cricket meadows I’ve made over the years, I observed:
The total duration of a chirp is about ⅛ s
A chirp is made up of four distinct events:
a quieter short tone;
a longer louder tone of a fractionally higher pitch;
the same longer louder tone repeated;
the first short tone repeated
There is a very short silence between each tone
Each cricket appears to chirp at roughly the same pitch: some slightly lower, some slightly higher
The pitch of the tones is in the range 4500–5000 Hz: around D8 on the music scale
I didn’t attempt to model the actual stridulating mechanism of a particular species of cricket. I made what sounded sort of right to me. Hey, if Amos Dolbear could make stuff up and get it accepted as a “law”, I can at least get away with pulse width modulation and tiny tinny speakers …
This is the profile I came up with:
21 ms of 4568 Hz at 25% duty cycle
7 ms of silence
28 ms of 4824 Hz at 50% duty cycle
7 ms of silence
28 ms of 4824 Hz at 50% duty cycle
7 ms of silence
21 ms of 4568 Hz at 25% duty cycle
7 ms of silence
That’s a total of 126 ms, or ⅛ish seconds. In the code I made each instance play at a randomly-selected relative pitch of ±200 Hz on the above numbers.
For the speaker, I have a bunch of cheap PC motherboard beepers. They have a Dupont header that spans four pins on a Raspberry Pi Pico header, so if you put one on the ground pin at pin 23, the output will be connected to pin 26, aka GPIO 20:
# cricket thermometer simulator - scruss, 2024-02
# uses a buzzer on GPIO 20 to make cricket(ish) noises
# MicroPython - for Raspberry Pi Pico
# -*- coding: utf-8 -*-
from machine import Pin, PWM, ADC, freq
from time import sleep_ms, ticks_ms, ticks_diff
from random import seed, randrange
freq(125000000) # use default CPU freq
seed() # start with a truly random seed
pwm_out = PWM(Pin(20), freq=10, duty_u16=0) # can't do freq=0
led = Pin("LED", Pin.OUT)
sensor_temp = machine.ADC(4) # adc channel for internal temperature
TOO_COLD = 10.0 # crickets don't chirp below 10 °C (allegedly)
temps = [] # for smoothing out temperature sensor noise
personal_freq_delta = randrange(400) - 199 # different pitch every time
chirp_data = [
# cadence, duty_u16, freq
# there is a cadence=1 silence after each of these
[3, 16384, 4568 + personal_freq_delta],
[4, 32768, 4824 + personal_freq_delta],
[4, 32768, 4824 + personal_freq_delta],
[3, 16384, 4568 + personal_freq_delta],
]
cadence_ms = 7 # length multiplier for playback
def chirp_period_ms(t_c):
# for a given temperature t_c (in °C), returns the
# estimated cricket chirp period in milliseconds.
#
# Based on
# Dolbear, Amos (1897). "The cricket as a thermometer".
# The American Naturalist. 31 (371): 970–971. doi:10.1086/276739
#
# The inverse function is:
# t_c = (75000 / chirp_period_ms + 40) / 9
return int(15000 / (9 * t_c / 5 - 8))
def internal_temperature(temp_adc):
# see pico-micropython-examples / adc / temperature.py
return (
27
- ((temp_adc.read_u16() * (3.3 / (65535))) - 0.706) / 0.001721
)
def chirp(pwm_channel):
for peep in chirp_data:
pwm_channel.freq(peep[2])
pwm_channel.duty_u16(peep[1])
sleep_ms(cadence_ms * peep[0])
# short silence
pwm_channel.duty_u16(0)
pwm_channel.freq(10)
sleep_ms(cadence_ms)
led.value(0) # led off at start; blinks if chirping
### Start: pause a random amount (less than 2 s) before starting
sleep_ms(randrange(2000))
while True:
loop_start_ms = ticks_ms()
sleep_ms(5) # tiny delay to stop the main loop from thrashing
temps.append(internal_temperature(sensor_temp))
if len(temps) > 5:
temps = temps[1:]
avg_temp = sum(temps) / len(temps)
if avg_temp >= TOO_COLD:
led.value(1)
loop_period_ms = chirp_period_ms(avg_temp)
chirp(pwm_out)
led.value(0)
loop_elapsed_ms = ticks_diff(ticks_ms(), loop_start_ms)
sleep_ms(loop_period_ms - loop_elapsed_ms)
There are a few more details in the code that I haven’t covered here:
The program pauses for a short random time on starting. This is to ensure that if you power up a bunch of these at the same time, they don’t start exactly synchronized
The Raspberry Pi Pico’s temperature sensor can be slightly noisy, so the chirping frequency is based on the average of (up to) the last five readings
There’s no chirping below 10 °C, because Amos Dolbear said so
The built-in LED also flashes if the board is chirping. It doesn’t mimic the speaker’s PWM cadence, though.
Before I show you the next video, I need to say: no real crickets were harmed in the making of this post. I took the bucket outside (roughly -5 °C) and the “crickets” stopped chirping as they cooled down. Don’t worry, they started back up chirping again when I took them inside.
“If You’re Cold They’re Cold, Bring Them Inside” (video description: a plastic box containing three USB power banks, each with USB cable leading to a Raspberry Pi Pico board. Each board has a small electromagnetic speaker attached between ground and a data pin)
Somewhat painterly view of the button doing its thing. The weird clunking sound is my camera’s continuous focus. For a clearer but more flickery view, see here
Following on from a customer query at Elmwood Electronics, I can confirm that one can install install addressable RGB LEDs/NeoPixels inside one of these large buttons. It’s not the easiest build, so whether one should attempt this is another matter entirely.
Thin (and I mean thin: I used 28 AWG) Silicone Cover Stranded-Core Wire in several colours. You’ll want to cut this quite long at first, as you have to ease it through some tiny holes in the button assembly. If you solder connectors on the end, you won’t be able to disassemble or install the button without cutting them off. Do I speak from experience here? You betcha!
The usual soldering/hot gluing/bending/prying/grabbing/cutting tools you already know and love. In addition, you might consider a non-marring spudger and a pair of small(ish) arterial forceps (aka hemostats, aka Kelly forceps, aka fishing hook removal pliers)
I’m not going to cover soldering the wires to the LED PCB in any depth here. You’ll need three wires: 5 V power, Ground and Data. Even though the LEDs I used need 5 V power, they are quite happy with 3.3 V logic on the data line. They need more than 3.3 V power to light, though.
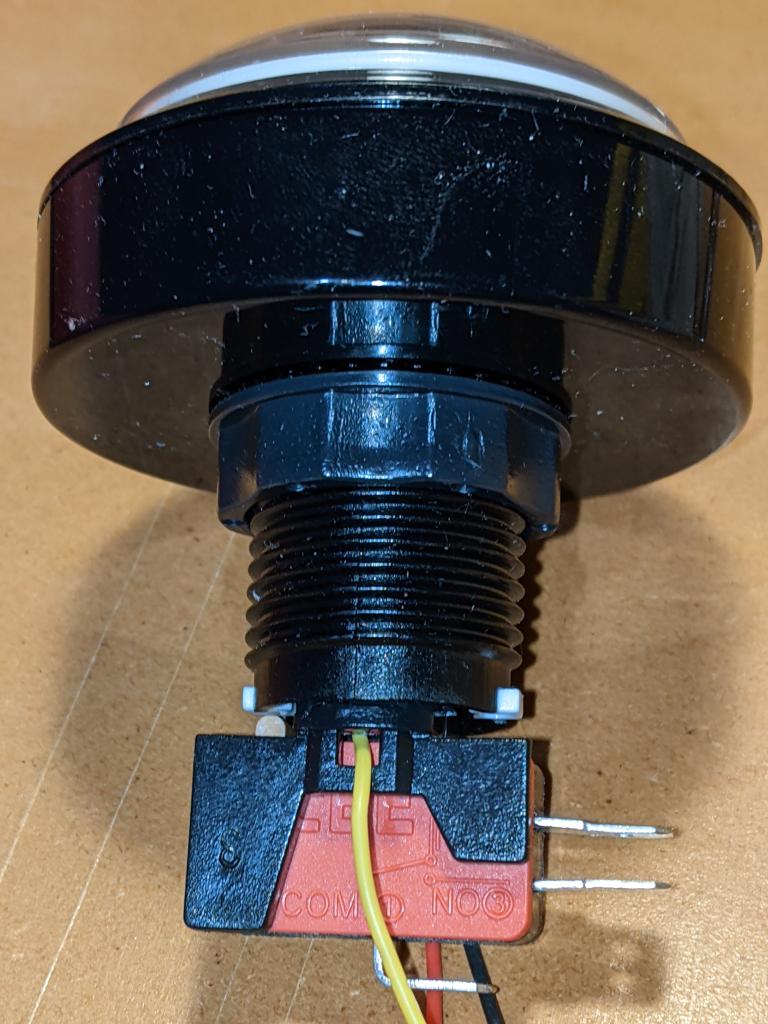
The button in two pieces, as you might expect to receive it
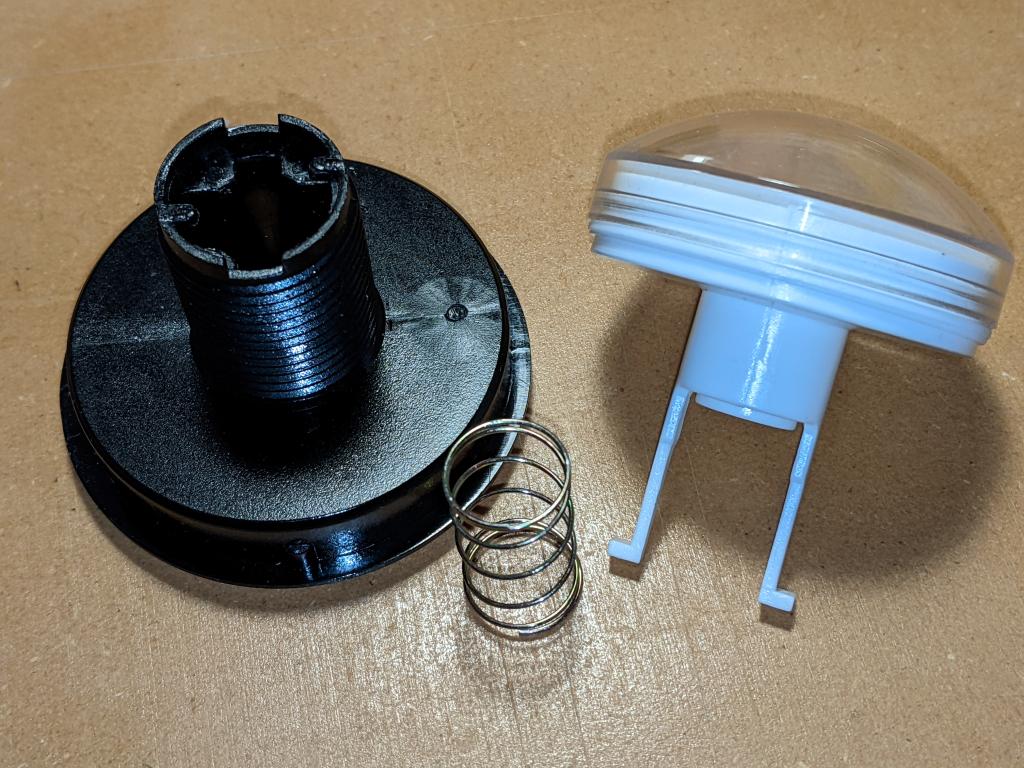
Main parts of the button top, once you’ve removed the lock ring
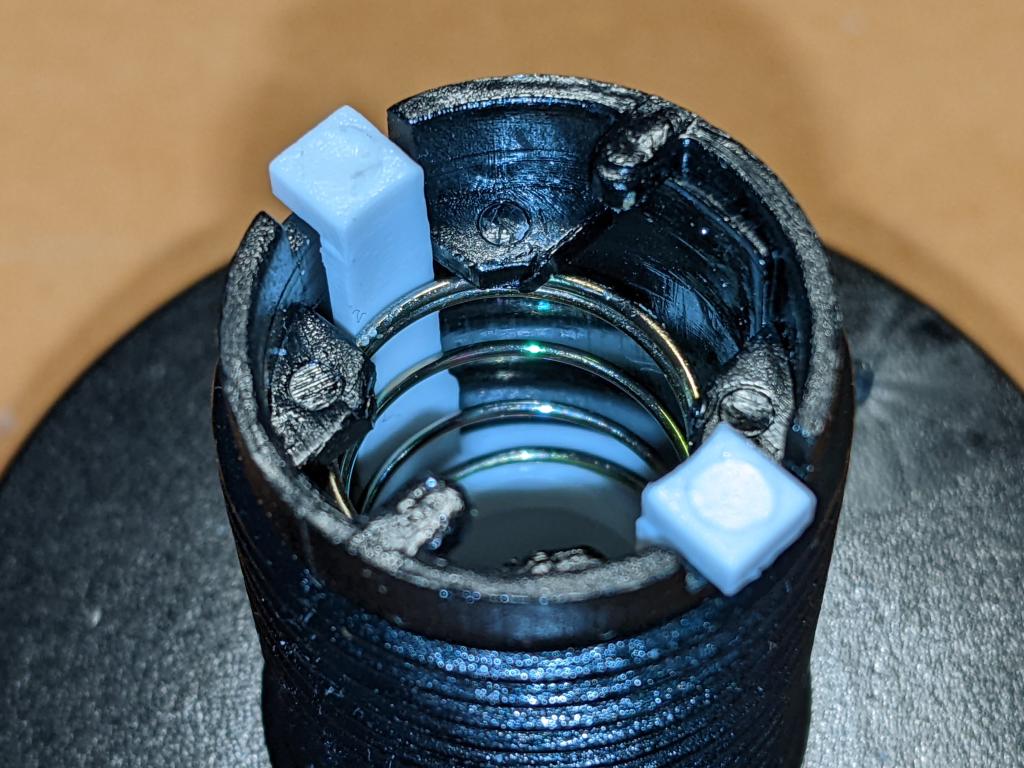
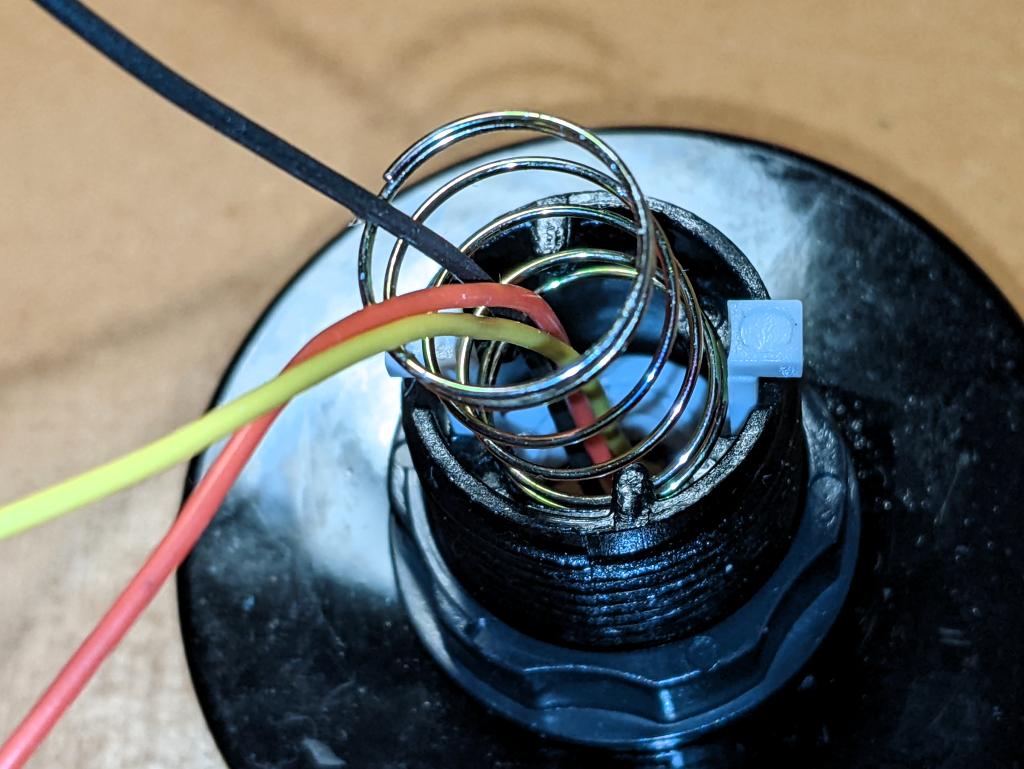
First step is to ease the spring out without bending it too much or breaking the retainer tabs
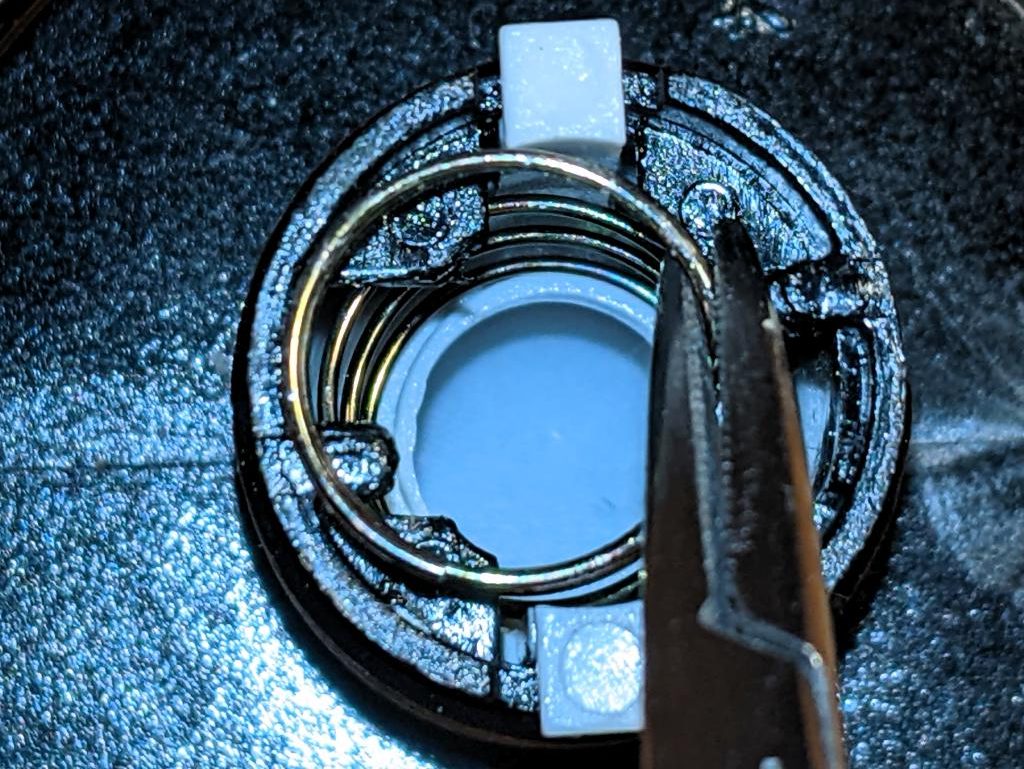
I used small forceps to ease the spring out. Once you get it started, it unscrews easily from behind the retainers
Now the spring is out the way, you can squeeze in the actuator tabs and push them down the shaft to liberate the button top
The button top disassembled
Carefully lever off the clear top with a blunt tool like a spudger. Now would have been a great time to clean dust and other wee bits off your workspace, as they’ll surely end up inside the button, looking nasty
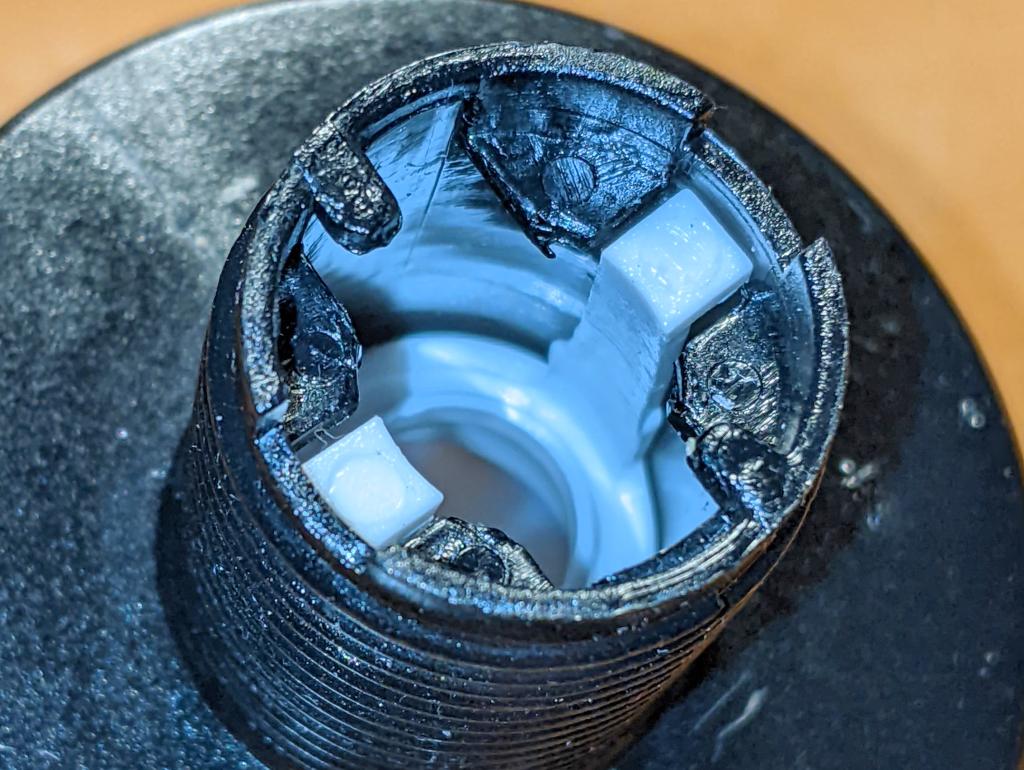
The button top opened up. The cavity is about 45 mm in diameter and only a few millimetres deep
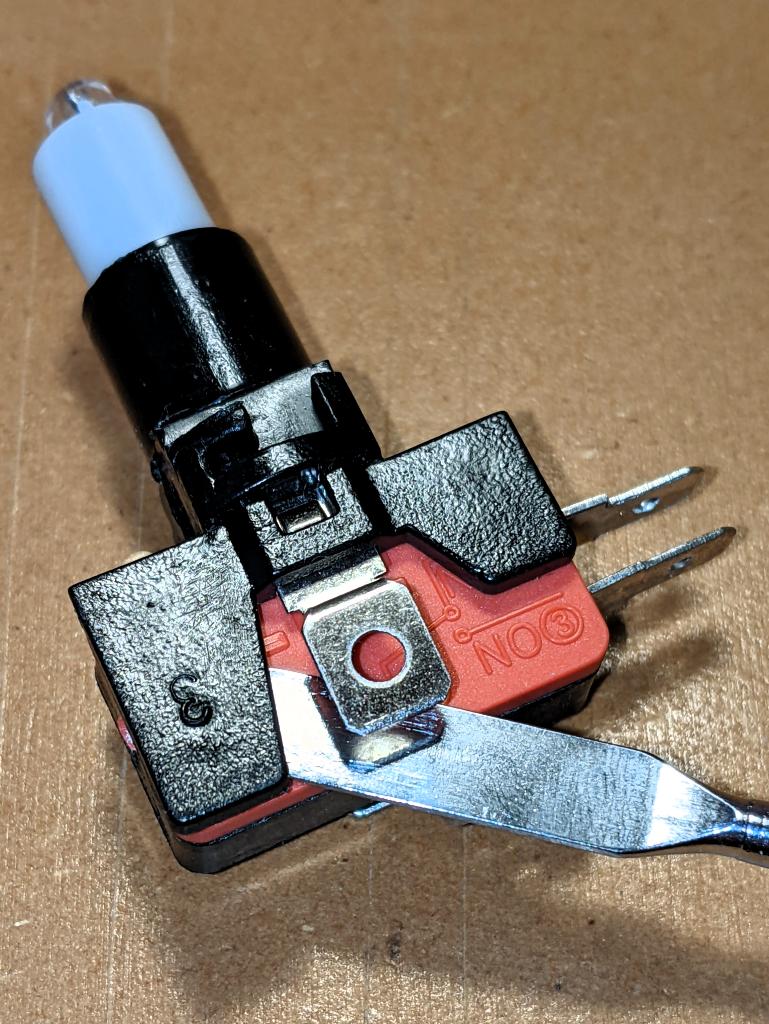
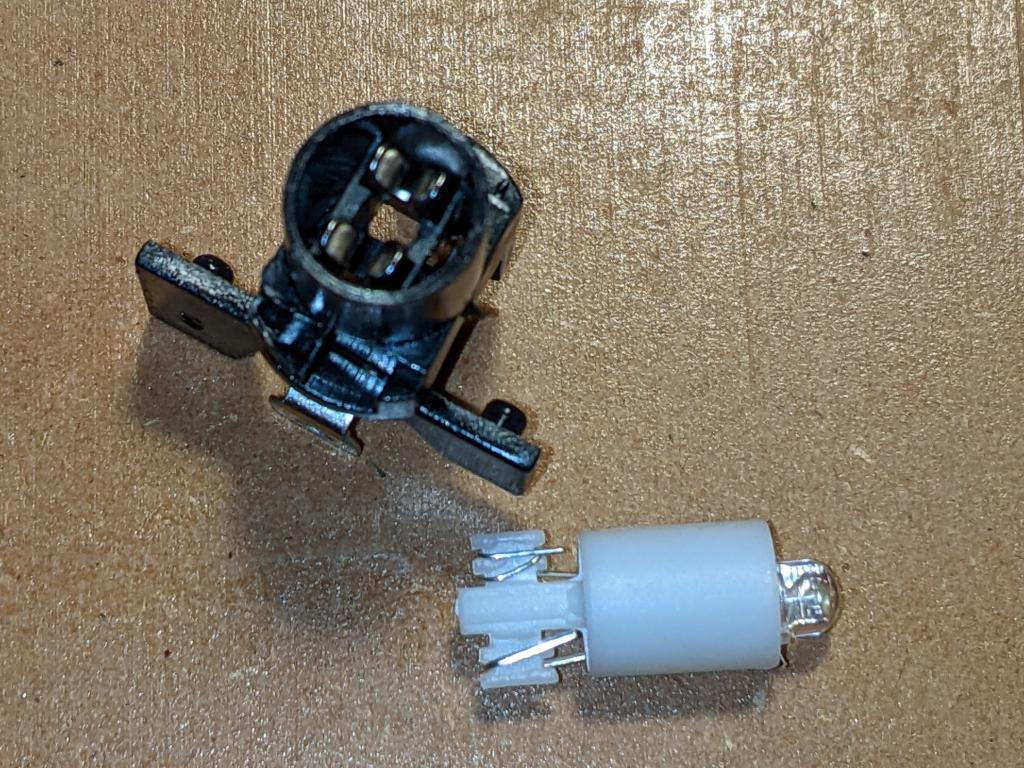
Removing the LED holder from the microswitch is done by levering open (gently) the plastic tab that clamps the holder onto the switch.
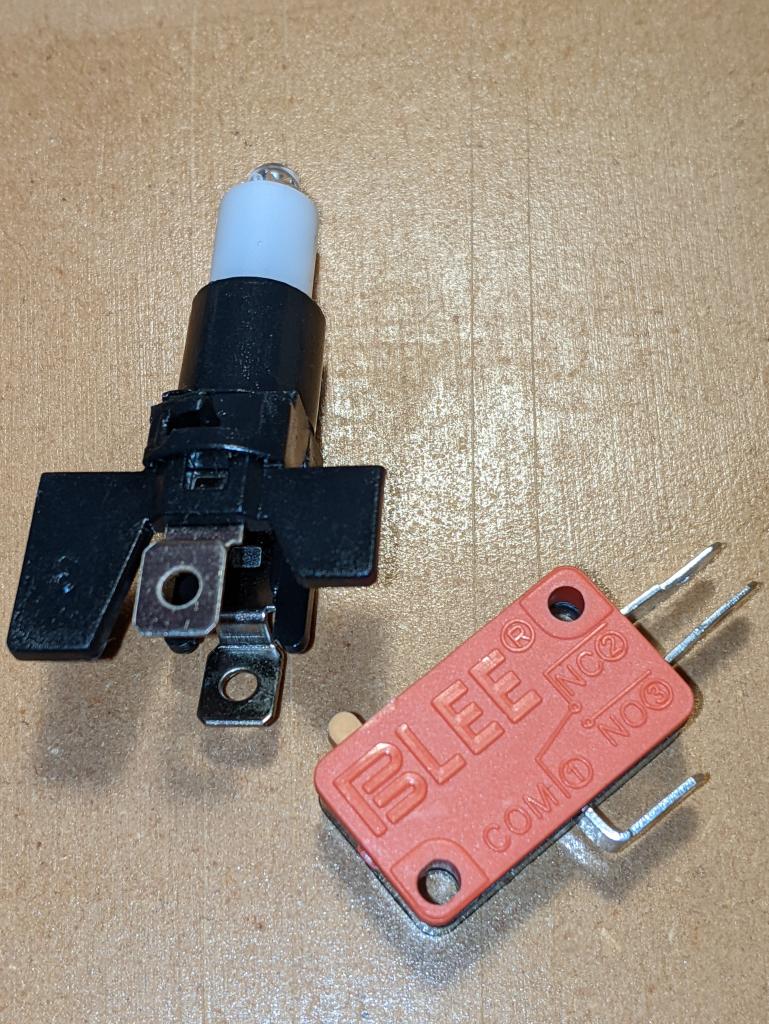
LED holder and microswitch separated. For normal button operation, the contacts NO and COM become connected when the button is pressed. The spade contacts on the LED holder look like they should come out, and they will (soon)
Pull the LED out from the holder, and you’ll see the metal clips that held it in place. These clips have to come out: I found the pushing them in slightly while pulling down on the spade connector eased them out eventually
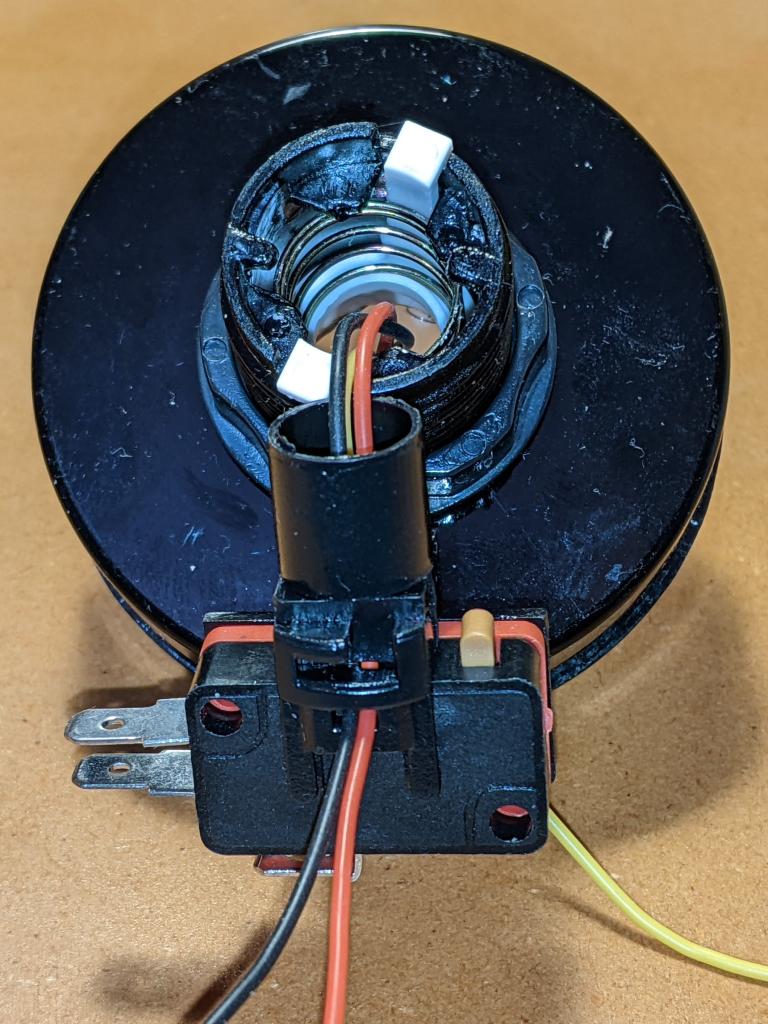
LED ring hot glued into place. Make sure that the wires are properly secured, as you don’t want to take this apart againFit the clear button top back inside the base, feeding the wires through the shaft. Fitting the return spring back in is a bit more chaotic than getting it out. I ended up jamming it in with forceps, and it seemed to sort out okay despite that
The really fiddly bit: feeding the wires through the tiny gaps where the LED holder clips/contacts used to be. Even using thin (28 AWG) silicone covered wire, all three wires couldn’t fit down one side. Make sure the wires are pulled gently through, and aren’t snagged anywhere
Finished! Make sure that the switch actuates properly by lining up the LED holder in the bayonets inside the shaft. Of course, you’ll have wanted to install the button in your project before doing this assembly, as you’ll have to feed those pesky wires back through again if you haven’t …
The biggest thing that tripped me up was that PicoMite BASIC starts arrays at 0. OPTION BASE 1 fixes that oversight. It would have been nice to have OpenProcessing’s HSV colour space, and an editor that could handle lines longer than 80 characters that didn’t threaten to bomb out if you hit the End key, but it’ll serve.
Source below:
' autumn in canada
' scruss, 2021-11
' a take on my https://openprocessing.org/sketch/995420 for picomite
OPTION base 1
RANDOMIZE TIMER
' *** initialize polar coords of leaf polygon and colour array
DIM leaf_rad(24), leaf_ang(24), px%(24), py%(24)
FOR i=1 TO 24
READ leaf_rad(i)
NEXT i
FOR i=1 TO 24
READ x
leaf_ang(i)=RAD(x)
NEXT i
DIM integer c%(8)
FOR i=1 TO 8
READ r%, g%, b%
c%(i)=RGB(r%,g%,b%)
NEXT i
' *** set up some limits
min_scale%=INT(MIN(MM.HRES, MM.VRES)/8)
max_scale%=INT(MIN(MM.HRES, MM.VRES)/6)
min_angle=-30
max_angle=30
min_x%=min_scale%
min_y%=min_x%
max_x%=MM.HRES - min_x%
max_y%=MM.VRES - min_y%
CLS
TEXT MM.HRES/2, INT(MM.VRES/3), "autumn in canada", "CM"
TEXT MM.HRES/2, INT(MM.VRES/2), "scruss, 2021-11", "CM"
TEXT MM.HRES/2, INT(2*MM.VRES/3), "just watch ...", "CM"
kt%=0
DO
cx% = min_x% + INT(RND * (max_x% - min_x%))
cy% = min_y% + INT(RND * (max_y% - min_y%))
angle = min_angle + RND * (max_angle - min_angle)
sc% = min_scale% + INT(RND * (max_scale% - min_scale%))
col% = 1 + INT(RND * 7)
leaf cx%, cy%, sc%, angle, c%(7), c%(col%)
kt% = kt% + 1
LOOP UNTIL kt% >= 1024
END
SUB leaf x%, y%, scale%, angle, outline%, fill%
FOR i=1 TO 24
px%(i) = INT(x% + scale% * leaf_rad(i) * COS(RAD(angle)+leaf_ang(i)))
py%(i) = INT(y% - scale% * leaf_rad(i) * SIN(RAD(angle)+leaf_ang(i)))
NEXT i
POLYGON 24, px%(), py%(), outline%, fill%
END SUB
' radii
DATA 0.536, 0.744, 0.608, 0.850, 0.719
DATA 0.836, 0.565, 0.589, 0.211, 0.660, 0.515
DATA 0.801, 0.515, 0.660, 0.211, 0.589, 0.565
DATA 0.836, 0.719, 0.850, 0.608, 0.744, 0.536, 1.000
' angles
DATA 270.000, 307.249, 312.110, 353.267, 356.540
DATA 16.530, 18.774, 33.215, 3.497, 60.659, 72.514
DATA 90.000, 107.486, 119.341, 176.503, 146.785, 161.226
DATA 163.470, 183.460, 186.733, 227.890, 232.751, 270.000, 270.000
' leaf colours
DATA 255,0,0, 255,36,0, 255,72,0, 255,109,0
DATA 255,145,0, 255,182,0, 255,218,0, 255,255,0
You could probably use AUTOSAVE and paste the text into the PicoMite REPL. I used an ILI9341 SPI TFT LCD Touch Panel with my Raspberry Pi Pico along with some rather messy breadboard wiring.
Fun fact: the maple leaf polygon points are derived from the official definition of the flag of Canada.
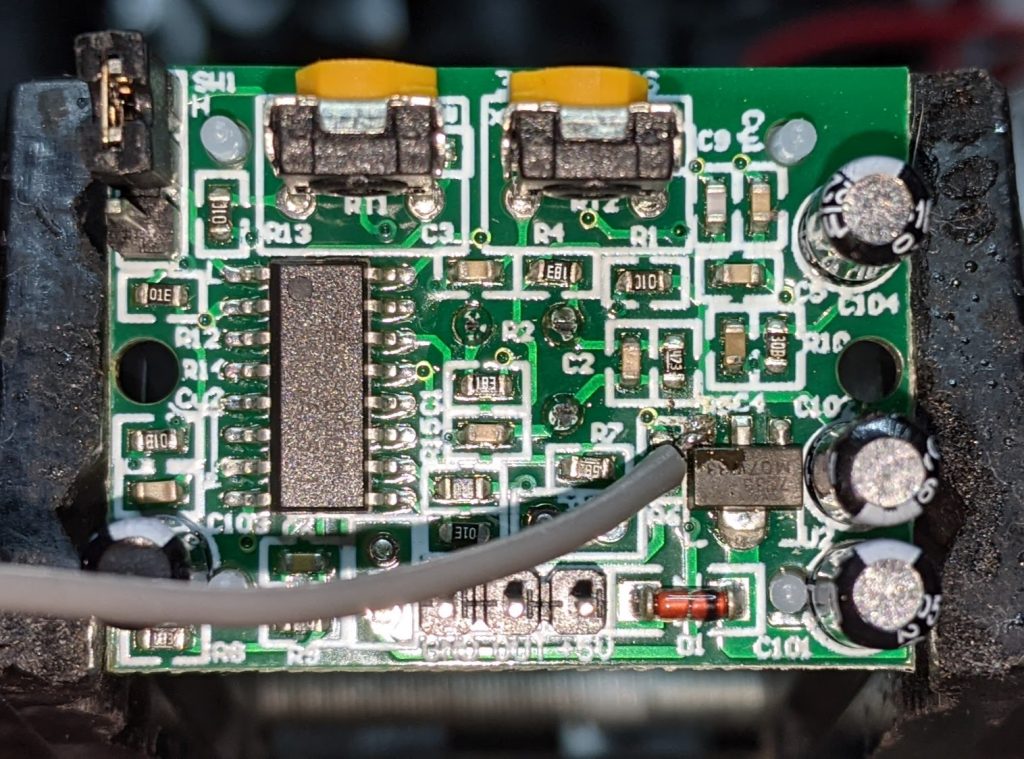
slightly dodgy soldering of a grey jumper wire to the Vout pin of the PIR’s voltage regulator
Consider the Adafruit PIR (motion) sensor (aka PIR Motion Sensor, if you’re in Canada). Simple, reliable device, but only runs from a 5 V supply. Yes, there are smaller PIRs that run off 3.3 V, but if this is what you have, you need to do some soldering. Annoyingly, the sensor on the board is a 3.3 V part, but the carrier was designed in Olden Tymes when King 5 V ruled.
You can try powering it from 3.3 V, but it’ll go all off on its own randomly as its own power supply won’t be supplying enough voltage. There are a couple of sites on how to modify these PIRs that either describe old kit you can’t get any more, or do it completely wrongly. Just one post on the Adafruit support forum gets it right.
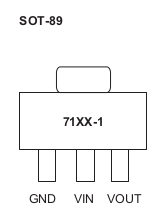
One way of doing this is to provide 3.3 V directly to the output pin of the voltage regulator, and ignore the 5 V power line entirely. The regulator’s a SOT89-3 part that looks a bit like this:
wee leggy thing
In the photo above, it’s flipped over. Whichever way it’s oriented, we want to put power directly into the Vout pin. There may be easier points to solder this to than a tiny surface mount pin (almost definitely one of the capacitors) but this has held for me.
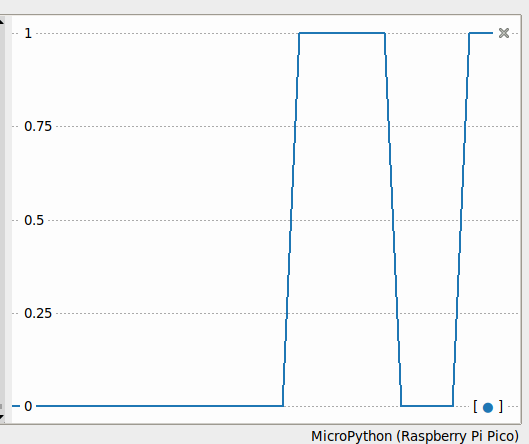
How to use it in MicroPython? Like the TTP223 capacitive touch sensors I looked at before, a PIR gives a simple off/on output, so you can use something like this:
from machine import Pin
from time import sleep_ms
pir = Pin(21, Pin.IN)
while True:
print("[", pir.value(), "]")
sleep_ms(1000)
value() will return 1 if there’s movement, 0 if not. There are trigger time and sensitivity potentiometers to fiddle with on the board if you need to tweak the output.
Thonny plotter output showing a couple of movement detections. High output (on my device) stays up for about 4 seconds, so you can be pretty leisurely about polling PIRs
Just remember: don’t connect the 5 V power line if you make this mod. I’m not responsible for any smoke emitted if you do — but I can always sell you a replacement …
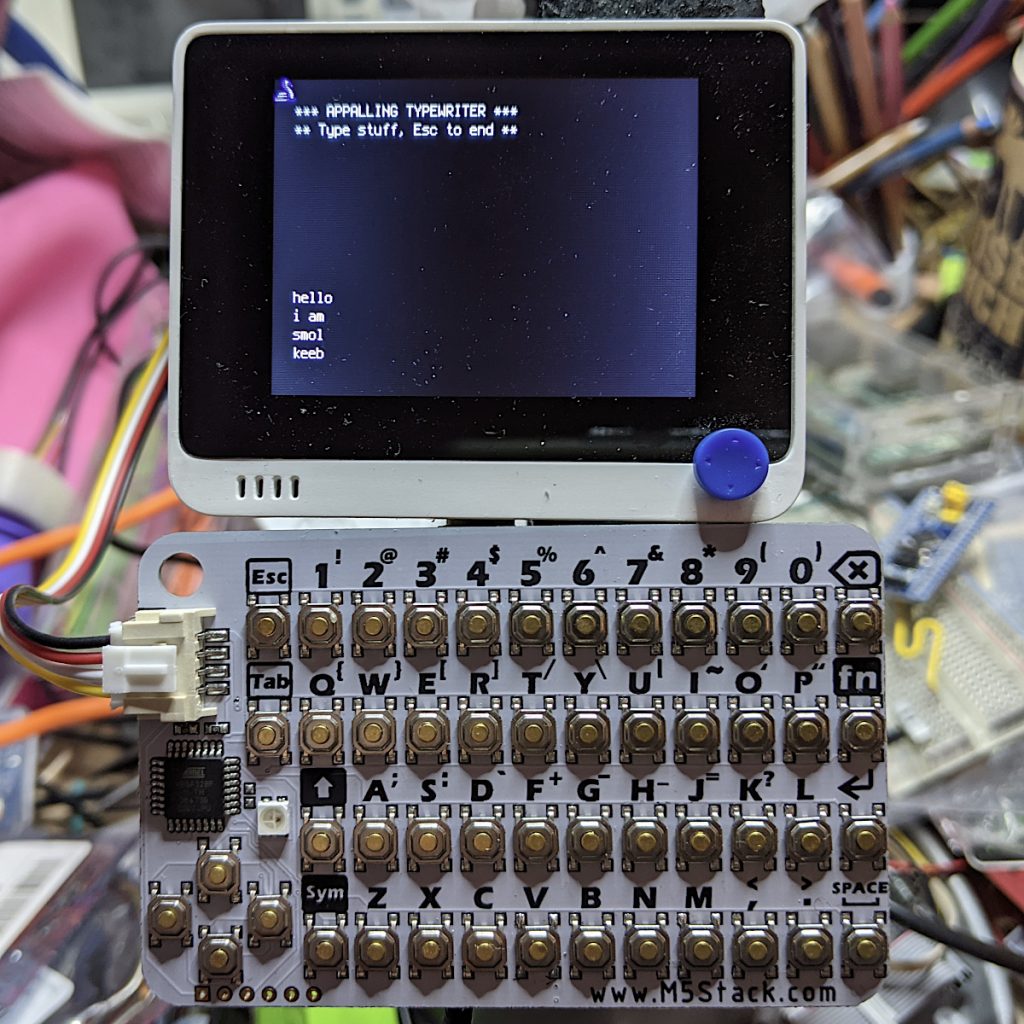
it really is the size of a credit card (running with a SeeedStudio Wio Terminal)
I got one of these CardKB Mini Keyboards to see if I could use it for small interactives with MicroPython devices. It’s very small, and objectively not great as a mass data entry tool. “Better than a Pocket C.H.I.P. keyboard” is how I’d describe the feel. It’s also pretty reliable.
It’s got an I²C Grove connector, and its brains are an ATMega chip just like an Arduino. It’s strictly an ASCII keyboard: that is, it sends the 8-bit ASCII code of the key combination you pressed. It doesn’t send scan codes like a PC keyboard. The driver source is in the CardKB m5-docs, so if you really felt ambitious you could write a scan code-like firmware for yourself.
The device appears at I²C peripheral address 95, and returns a single byte when polled. That byte’s either 0 if no key was pressed, or the character code of what was pressed. The Esc key returns chr(27), and Enter returns CR. If you poll the keyboard too fast it seems to lose the plot a little, so a tiny delay seems to help
Here’s a small demo for MicroPython that acts as the world’s worst typewriter:
# M5Stack CardKB tiny keyboard - scruss, 2021-06
# MicroPython - Raspberry Pi Pico
from machine import Pin, I2C
from time import sleep_ms
i2c = I2C(1, scl=Pin(7), sda=Pin(6))
cardkb = i2c.scan()[0] # should return 95
if cardkb != 95:
print("!!! Check I2C config: " + str(i2c))
print("!!! CardKB not found. I2C device", cardkb,
"found instead.")
exit(1)
ESC = chr(27)
NUL = '\x00'
CR = "\r"
LF = "\n"
c = ''
print("*** APPALLING TYPEWRITER ***")
print("** Type stuff, Esc to end **")
while (c != ESC):
# returns NUL char if no character read
c = i2c.readfrom(cardkb, 1).decode()
if c == CR:
# convert CR return key to LF
c = LF
if c != NUL or c != ESC:
print(c, end='')
sleep_ms(5)
And here’s the CircuitPython version. It has annoying tiny differences. It won’t let me use the I²C Grove connector on the Wio Terminal for some reason, but it does work much the same:
# M5Stack CardKB tiny keyboard - scruss, 2021-06
# CircuitPython - SeeedStudio Wio Terminal
# NB: can't use Grove connector under CPY because CPY
import time
import board
import busio
i2c = busio.I2C(board.SCL, board.SDA)
while not i2c.try_lock():
pass
cardkb = i2c.scan()[0] # should return 95
if cardkb != 95:
print("!!! Check I2C config: " + str(i2c))
print("!!! CardKB not found. I2C device", cardkb,
"found instead.")
exit(1)
ESC = chr(27)
NUL = '\x00'
CR = "\r"
LF = "\n"
c = ''
b = bytearray(1)
# can't really clear screen, so this will do
for i in range(12):
print()
print("*** APPALLING TYPEWRITER ***")
print("** Type stuff, Esc to end **")
for i in range(8):
print()
while (c != ESC):
# returns NUL char if no character read
i2c.readfrom_into(cardkb, b)
c = b.decode()
if c == CR:
# convert CR return key to LF
c = LF
if c != NUL or c != ESC:
print(c, end='')
time.sleep(0.005)
# be nice, clean up
i2c.unlock()
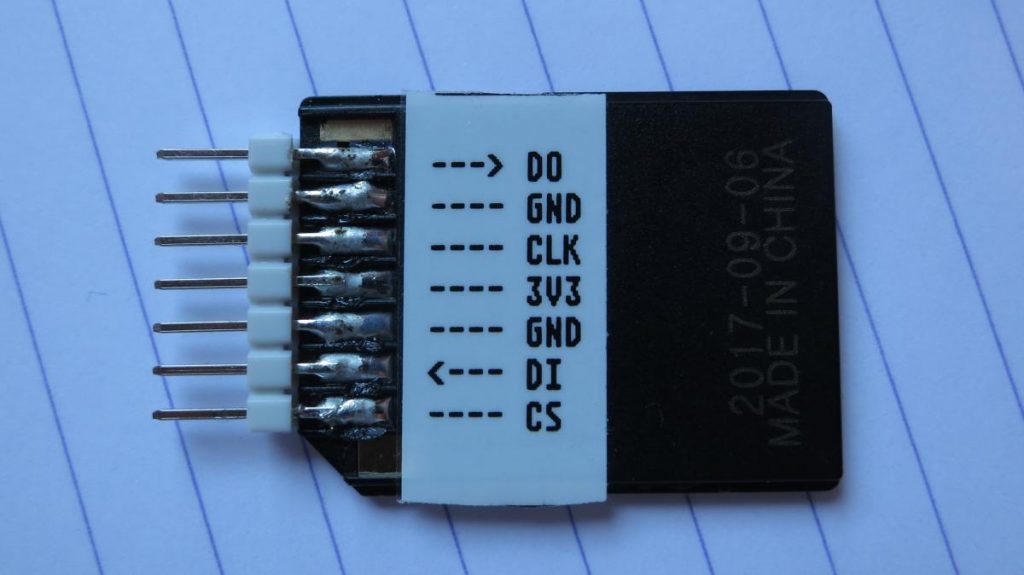
micro-SD adapter + pins + solder = working SD interface
It’s only a serial SPI interface, but you can’t beat the price. It should only be used with 3.3 V micro-controllers like the Raspberry Pi Pico, since micro-SD cards don’t like 5 V directly atall.
You might want to pre-tin the pins and apply some extra flux on both surfaces, because these pads are thin and you don’t want to melt them. I used my standard SnAgCu lead-free solder without trouble, though.
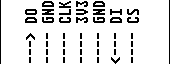
got a label maker? This label’s the same length as an SD card is wide, as shown above. Made entirely with netpbm
You only need to use one of the Ground connections for the card to work.
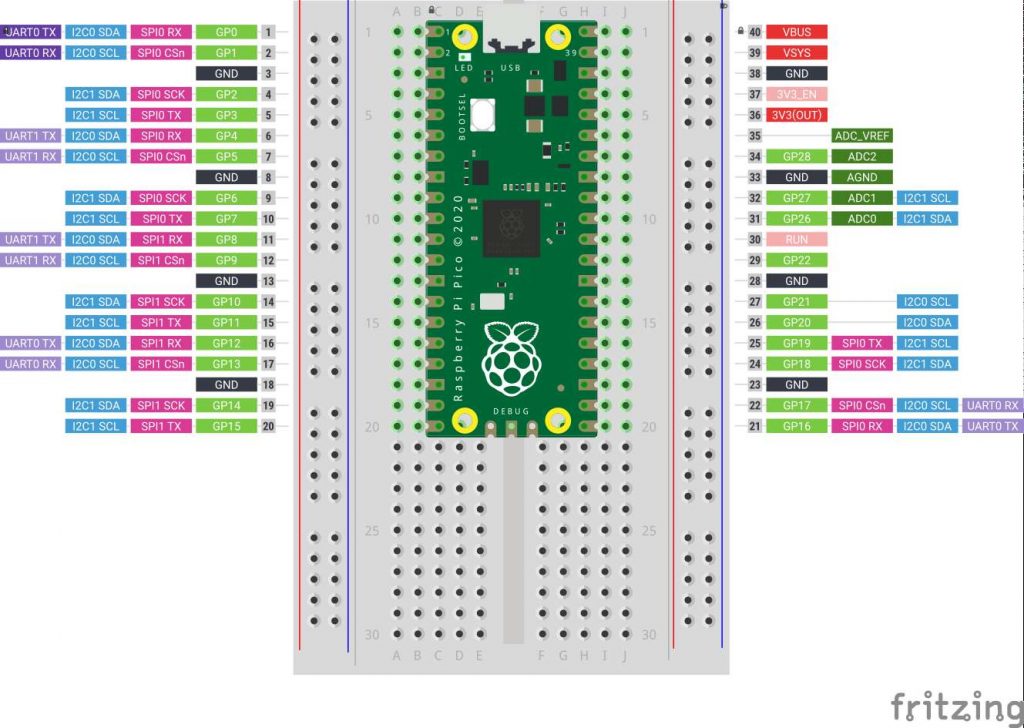
Nothing particularly new or innovative here, but if you’re making simple Raspberry Pi Pico circuits and need to explain them to folks, this little Fritzing template might help. It’s mashed up from:
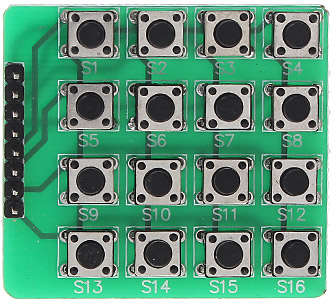
You’ll see these parts described as variations on “4×4 Matrix 16 Keypad Keyboard Module 16 Button†on ebay. They’re very simple: if you press a button (say S7), the row pins (R1-4; R2 for S7) and the column pins (C1-C4; C3 for S7) are connected. So pins R2 and C3 are connected when S7 is pressed. You can use the Arduino Keypad library to talk to these, but do remember they use up 8 I/O pins.
It’s not internally routed in Fritzing, and you likely won’t be able to use it for any kind of schematic work, but who uses Fritzing for anything other than pretty pictures?
in which I finally learn about Fritzing’s wire alignment facility …
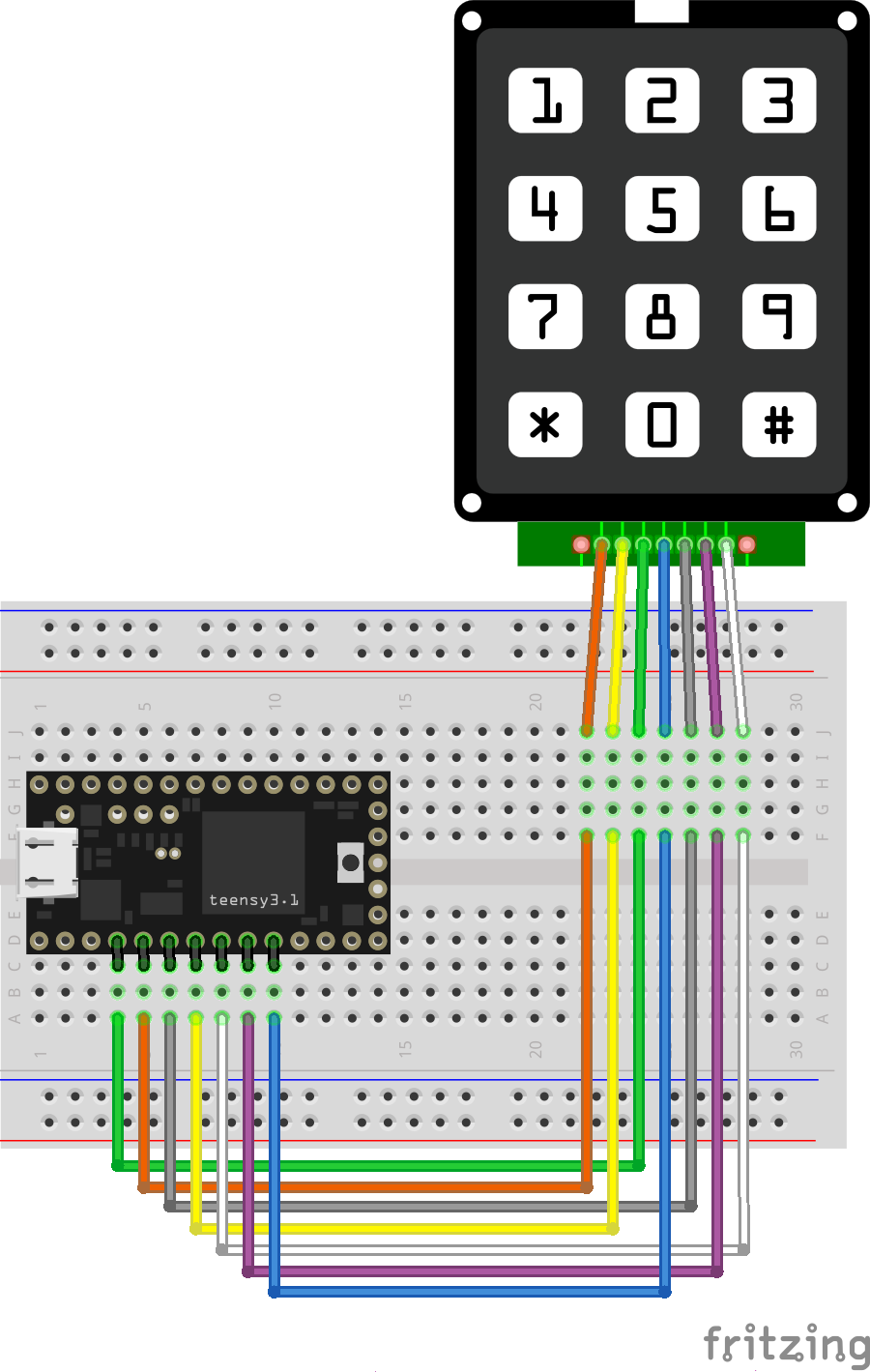
I’ve had a couple of Teensy boards for a while, but a misunderstanding that they needed a load of of extra software installed (they need one thing, and it’s easy) had kept me away. They’ve got really impressive specs, and they’re especially easy to turn into USB devices like keyboards.
Super-heavy CEECO keypad
Here’s a little demo that turns a phone keypad — in my case, a ridiculously solid CEECO solid metal keypad designed for institutional use — into a simple USB keyboard. Plug it into any machine (including a Raspberry Pi) and it will be identified as a keyboard. No drivers are required.
The code is based on the standard Arduino Keypad library basic demo. That code was meant for a different keypad, so I eventually found a configuration that worked in the Sparkfun 12 button keypaddatasheet. Rather than printing characters to the serial port, I used calls to Teensy’s USB Keyboard library instead.
The pinout is (from left to right, key side up):
do not connect
Column 2
Row 1
Column 1
Row 4
Column 3
Row 3
Row 2
n/c
There’s no reason why this wouldn’t work with those very cheap 4×4 button matrix keypads for Arduino too with only minor modifications. Those keypads use 8 data lines, and they’re arranged (I think) as rows 1-4 on pins 1-4 and columns 1-4 are pins 5-8. columns 4-1 then rows 1-4 from the top of the pin connector down:
The Teensy USB keyboard isn’t limited to sending single characters: a single button press could trigger sending a whole string. I haven’t yet thought out any major uses for this (except “Crypto!â€, which is my usual idea when I have no idea what I’m doing), but you might have better plans.
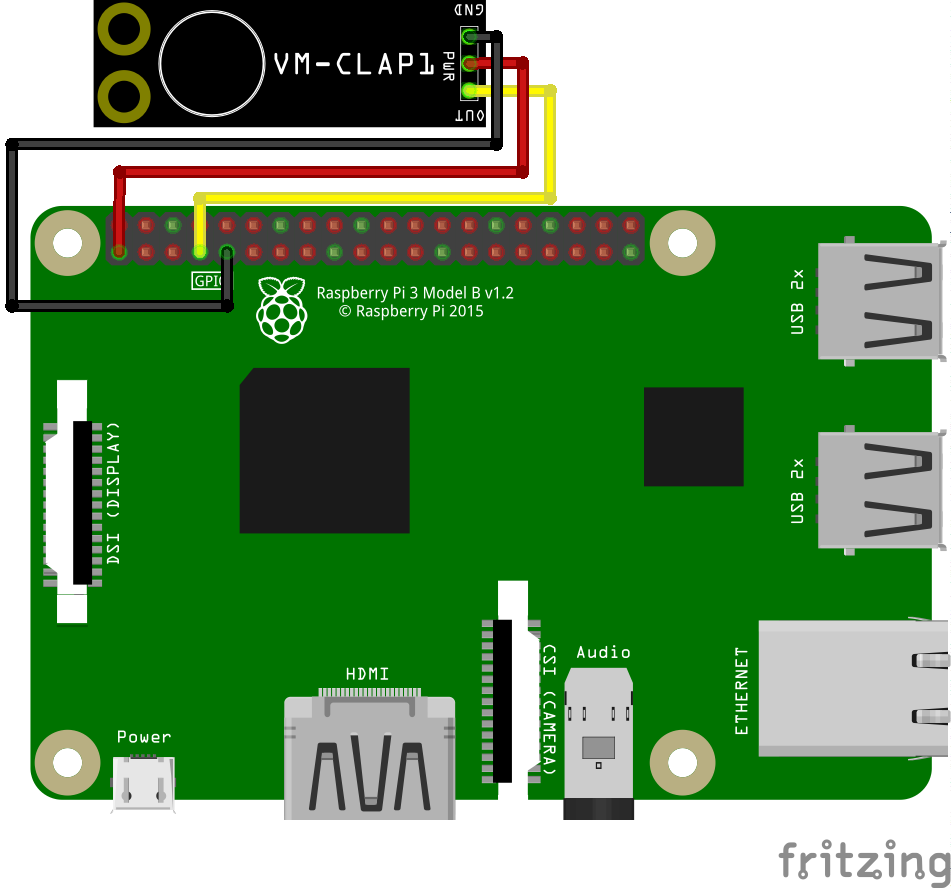
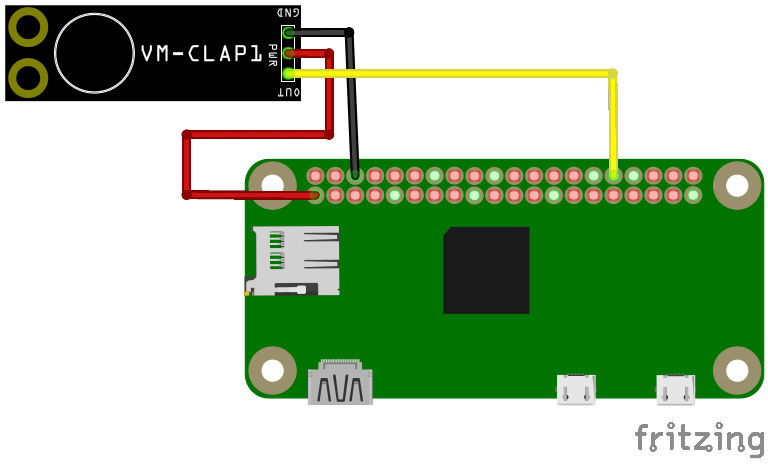
Since the Verbal Machines VM-CLAP1 sensor is an open collector type — that is, it sinks current when triggered — it behaves like a simple button to gpiozero, the Raspberry Pi Python GPIO library. If you attach a callback function to the sensor’s when_pressed event, your Python script will call that function every time it registers a clap.
The wiring is as simple as it could be:
VM-CLAP1: Raspberry Pi:
 ========= =============
 GND → GND
 PWR → 3V3
 OUT → GPIO 4
This example code just prints clap! when the board picks up a ðŸ‘:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# Raspberry Pi gpiozero test for
# Verbal Machines VM-CLAP1 clap sensor
# scruss - 2017-06
#
# Wiring:
#
# VM-CLAP1: Raspberry Pi:
# ========= =============
# GND → GND
# PWR → 3V3
# OUT → GPIO 4
from gpiozero import Button
from signal import pause
def clapping():
print("clap!")
clap = Button(4)
clap.when_pressed = clapping
pause()
This is a trivial example, but at least it shows that anything you can do with a button, you can also do with this hand-clap sensor.
It should work in Breadboard and Schematic mode, but absolutely doesn’t work in PCB mode. This shouldn’t be a problem, as it’s only available as a standalone board. Fritzing doesn’t have any way to create new parts from scratch any more, so I had to base it on a somewhat similar-looking board, the SparkFun Electret Microphone Breakout.
I’m looking forward to see what I can do with gpiozero and the clap sensor.
I want to make an edge-lit numeric display. These were a common technology before numeric LEDs were available. They use 10 illuminated slides to display individual numbers. Here’s my first try at the display:
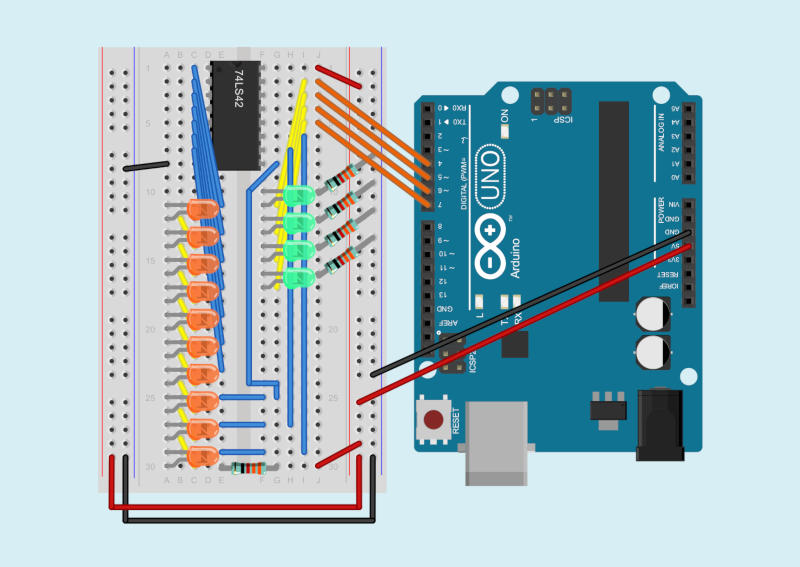
The 74LS42 logic chip (4-Line BCD to 10-Line Decimal Decoder) seems a likely candidate to drive such a display. You feed it a 4-bit binary-coded decimal input, and the chip activates one of ten outputs. It’s a low-voltage version of the old 7441 chip used for driving Nixie tubes. Here’s what I got working as a demo of the 7442, driven by an Arduino:
Because the 7442 will only activate one output at a time, it’s okay to use a single current-limiting resistor for all ten output LEDs. The chip also uses active low outputs: the outputs go from high to low when activated. The negative side of each LED goes to an output pin, and the chip sinks current when an output is selected, lighting the LED.
The components get in the way of seeing the wiring, so here’s another picture from Fritzing with just the wires and the breadboard:
Finally, here’s the Arduino sketch I wrote to drive the chip for the demo video. All it does is cycle through digital outputs 4–7, incrementing a bit every half second.
/*
SeventyfourFortytwo - Arduino demo of a
74LS42 - 4-line BCD to 10-line decimal decoder
Steps through 0-15, two steps per second
Shows the 74LS42's blocking of values 10-15 as invalid
Wiring:
Arduino 74LS42
======== =======
4 - 15 Input A (bit 0)
5 - 14 Input B (bit 1)
6 - 13 Input C (bit 2)
7 - 12 Input D (bit 3)
scruss - 2016-09-23
*/
int n = 0;
void setup() {
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop() {
digitalWrite(4, n & 1);
digitalWrite(5, n & 2);
digitalWrite(6, n & 4);
digitalWrite(7, n & 8);
n++;
if (n > 15) n = 0;
delay(500);
}
If you felt really fancy, you could drive the LED inputs through PWM, and come up with just the right of flicker to make this look like a Nixie tube. You should also be able to chain the inputs through some shift registers, too.
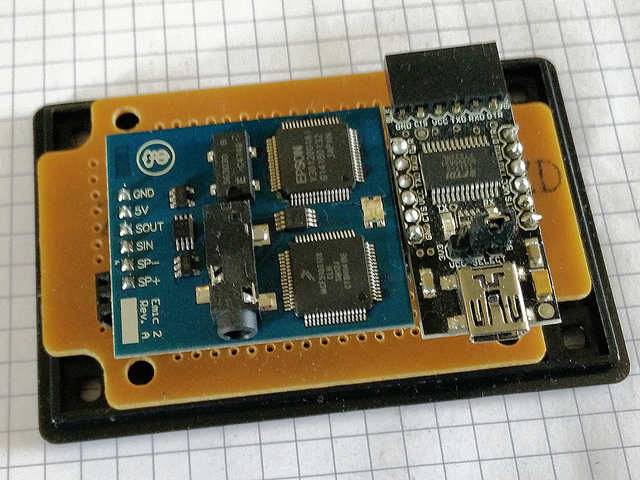
[tɒk bɒks]: case[tɒk bɒks]: inside. The observant amongst you will notice that the speech board is 1/10″ further in than it should be for ideal alignment with the USB serial adapter.
Note (2025): Parallax Inc have stopped selling the board this project is based on. I’ve added local copies of the reference documents at the end of this post. If you want basic embedded English speech, there are other options available.
Back in the 1980s, the now-defunct Digital Equipment Corporation (“DEC”) sold a hardware speech synthesizer based on Dennis Klatt’s research at MIT. These DECTalk boxes were compact and robust, and — despite not having the greatest speech quality — gave valuable speech, telephone and reading accessibility to many people. Stephen Hawking’s distinctive voice is from a pre-DEC version of the MIT hardware.
DEC is long gone, and the licensing of DECTalk has wandered off into mostly software (ahem …). Much to the annoyance of those in earshot, I’ve always enjoyed dabbling in speech synthesis. DECTalk hardware remains expensive, partly because of demand from electronic music producers (its vocoder-like burr is on countless tracks), but also because there are still many people who rely on it for daily life. I couldn’t justify buying a real DECTalk, but I found this: the Parallax Emic 2 Text-to-Speech Module. For about $80, this stamp-sized board brings a hardware DECTalk implementation to embedded projects.
The Emic 2 is really marketed to microcontroller hobbyists: Make Your Arduino Speak! sorta thing. But I wanted to make a DECTalk-ish hardware box, with serial input, a speaker, and switchable headphone/line jack. [tɒk bɒks] (a fair IPA approximation of how I pronounce “Talk Box”) is the result.
OSEPP FTDI USB-Serial Breakout — there are many USB-Serial boards that would do this, but two points in this one’s favour are: i) it has header pins for breadboard use, and ii) I had a spare one.
Small 8Ω speaker element — the one I used is most likely a headphone element, bought from Active Surplus (RIP). This should be as small as you can get away with (and still hear) as the USB-Serial connection isn’t designed to supply audio power.
You’ll need some kind of serial terminal connection. In a pinch, you can use the serial monitor that is in the Arduino development environment. Either way, identify your serial port (/dev/ttyUSBN, COMN:, or /dev/tty-usbserialNNNN) and find a way to send 9600 baud, 8N1 characters to it. Hit Return, and you should be greeted by the Emic 2’s : prompt (or a ?, followed by :). Whether you get the prompt or not depends on whether local echo is set or not. Either way, try sending this line:
SAll watched over by machines of loving grace.
You should hear a voice say the title of Richard Brautigan’s lovely poem All Watched Over by Machines of Loving Grace (caution: video link contains nekkid hippies). You should get the : prompt back once the the speech has stopped. And that’s all there is to it: send an S, followed by up to 1023 bytes of (basically ASCII) text, followed by a newline, and it will be spoken. There’s more detail, of course, in the Emic 2 documentation and the Emic 2 Epson/Fonix DECTalk 501 User’s Guide for changing voices, etc. Yes, you can make it sing. No, you probably shouldn’t, though.
Notes
The Emic 2 has no serial flow control, so you have to wait until the module stops speaking (or you send it the stop command) before you can send more. The easiest way is to poll the serial port and see if there’s the : prompt waiting. Until you see the prompt, any text you send it may be lost.
The Emic 2 is an embedded device: Unicode is a bit of a stretch. It’s supposed to accept ISO Latin-1 8-bit characters (handy for Spanish mode), though.
Starting every speech line with S may make this board incompatible with assistive technology software such as the JAWS screen reader. I don’t think that this was the goal for Emic 2’s designers (Grand Idea Studio), however.
The output from the audio jack has a fair bit of noise on it, and you need to set the volume quite low to avoid hiss and hum. Your experience may be different, as I may have accidentally made a ground loop. There is an audible click at the start and end of the text, too.
The Emic 2 uses DECTalk v5 commands and phonemes. Many DECTalk resources on the web (like these songs) use v4 or older, which are subtly incompatible. I haven’t found a reliable conversion protocol yet.
The board also starts in Epson-style command mode, which uses slightly different commands from standard DECTalk.
To end, here’s the Emic 2’s “Dennis” voice reading all of Brautigan’s All Watched Over By Machines of Loving Grace: