originally from Twitter: Elmwood Electronics 🇨🇦 (@elmwoodelec) – 24 Oct 2017: Public service announcement! Don’t leave your #apple2 #vintagecomputer unattended, lest a capacitor or transformer decide to start smoking.
Author: scruss
-
local wildlife

its wee hands …! squee! Beavers are usually quite wary of me down at Bluffer’s Park, but I was about three metres away from this one and I didn’t seem to be interrupting.
A beaver in Bluffer’s Park gathers an unhurried snack of tasty green fronds The original video is nearly half a gigabyte. I don’t really want to use YouTube, so you’re getting it at 360p, courtesy of ffmpeg and lots of swearing.
I don’t want to turn this post into a rant about ffmpeg and its very special options, so here, for posterity, are the command lines I used to generate this from a Pixel 8 phone video:
ffmpeg -i PXL_20250807_103015312.mp4 -c:v libvpx-vp9 -b:v 0 -crf 32 -pass 1 -an -f null /dev/null
ffmpeg -i PXL_20250807_103015312.mp4 -c:v libvpx-vp9 -b:v 0 -crf 42 -pass 2 -r 30 -vf "scale=trunc(iw/6)*2:trunc(ih/6)*2" -c:a libopus -filter:a "volume=1.5" browsing_beaver-smaller.webm -
img2blocks
this image is supposed to be made almost entirely of sextant blocks, the Unicode characters around U+1FB00 – U+1FB1E made out of two columns of three blocks. They’re originally from broadcast teletext, and were made to build low-resolution images on a text screen

redrawn from an image in Artificial intelligence used to reduce cassowary road deaths in Queensland And here’s the original tiny image:

“Cassowary Detected”, at actual size Making the pixel to character map is quite tricky. The Sextant character block isn’t contiguous, and it’s not in the order we need. It’s also missing four characters: empty block, full block, left half block and right half block. These have to be pulled in from other Unicode blocks.
This is the map I came up with, from 0–63 with LSB at bottom right and MSB at top left:
🬞🬏🬭🬇🬦🬖🬵🬃🬢🬓🬱🬋🬩🬚🬹🬁🬠🬑🬯🬉▐🬘🬷🬅🬤🬔🬳🬍🬫🬜🬻🬀🬟🬐🬮🬈🬧🬗🬶🬄🬣▌🬲🬌🬪🬛🬺🬂🬡🬒🬰🬊🬨🬙🬸🬆🬥🬕🬴🬎🬬🬝█
After that, it’s a small matter of bashing something together in Python with PIL and Numpy. Here’s the source:
or if you want to take a look first: img2blocks – bitmap to Unicode sextants

X11’s wide_weave, scaled up (yes, there are clever things like Chafa that can do more, but it can’t do exactly what this does)
-
lightsleep vs deepsleep on Raspberry Pi Pico
Hey! This code situation may be changing soon, but this article was written about MicroPython v1.25.0 on RP2040. The situation on the Raspberry Pi Pico W / 2W /RP2350 might be quite different.
Many micro-controllers have timed energy-saving modes you can engage when they are idle. These are typically one of:
- light sleep: where memory contents are retained, but some parts of the CPU and peripherals are turned off to reduce current;
- deep sleep: memory is cleared, most of the CPU and peripherals are powered off. The CPU will reset fully on restart, so your program has to reload.
While MicroPython on the RP2040 has both machine.lightsleep() and machine.deepsleep() functions, there’s not much difference between them. In fact, the deepsleep() routine is merely lightsleep() followed by reset(). So there isn’t any efficiency gain in using deepsleep over lightsleep.
The functions take one argument: the sleep time, given in milliseconds. The largest value that is accepted is 4294966, or (2**32 // 10**3) - 1. That’s 71′ 34″. If you give a larger number, this exception is thrown:
ValueError: sleep too long, and the function returns immediately.If you’ve used machine.deepsleep(), you might want to know whether your micro-controller was started by applying power, or started from the reset() after deepsleep(). The machine.reset_cause() function returns one of two values:
- machine.PWRON_RESET: if the CPU was started from power on, or by briefly grounding the RUN pin;
- machine.WDT_RESET: if the CPU was soft reset, either by a watchdog timer or other software reset. This is the state returned after deepsleep().
Other MicroPython ports have more nuanced ways of handling sleep and reset states with better power saving.
If you’re running a tight polling loop and still wish to save a little power, machine.idle() is the recommended method.
-
For 4 MB ESP32-S3 users
If you have a Wemos/LOLIN S3 MINI PRO board, you might find that firmware images don’t flash so well. That’s because the ESP32-S3FH4R2 has 4 MB of flash storage, and most ESP32-S3 boards have 8 MB.
glenn20/mp-image-tool-esp32 might be your new friend:
mp-image-tool-esp32 -f 4M --resize vfs=2M ESP32_GENERIC_S3-20250415-v1.25.0.bin
This trims down a standard MicroPython ESP32-S3 firmware from a 4 MB filesystem partition down to 2 MB, and sets the overall flash size to 4 MB. Upload that to your board, and all will be well.
Alternatively, v1.26 supports “4MiB and larger” flash chips. I have confirmed that
ESP32_GENERIC_S3-20250724-v1.26.0-preview.binworks as expected:$ mpremote a1 run boardstats.py
Board : Generic ESP32S3 module with ESP32S3
Frequency : 160 MHz
Free Memory : 2061232
File storage: 2036 / 2048 K -
Just before the Extinction
Just before the Extinction, goth teen dinosaurs would lie on the ground and writhe into contorted positions. They were neither sure why they did this, nor why they called it “Fossil Practice”.
-
it’s white sucker time!
White suckers were running the weir on Highland Creek in Morningside Park on their way upstream to spawn.
lookit that little sucker go! white suckers say hello I’ve uploaded the first video to Wikimedia Commons for anyone to use: File:Catostomus commersonii runs the Highland Creek Weir.webm – Wikimedia Commons
-
plotter stuff on that Brother printer
That Brother laser printer you bought can also pretend it’s a plotter. One of the requirements embedded in a PCL-compatible printer is an implementation of HP-GL/2. This is a slightly modified version of the page description language used by HP’s pen plotters. With care, you can make proofs on a laser printer.
Take, for example, this figure drawn in HP-GL:
![[decorative] a spiralling figure made of scaled and rotated equilateral triangles](https://scruss.com/wordpress/wp-content/uploads/2025/04/hpgl-rotatey.png)
just some plotter stuff … It’s made up of familiar commands:
IN;SP1;PU4318,5988;
PD3971,5388,4664,5388,4318,5988;
PU4279,6026;
PD3957,5335,4716,5402,4279,6026;
…But add some magic header bytes (0x1b, 0x45, 0x1b, 0x25, 0x30, 0x42) and some trailer bytes (0x1b, 0x25, 0x30, 0x41, 0x1b, 0x45), and your printer understands it’s a PCL file.
The file, complete with header and trailer, is here:
You can print it like this:
lp -o raw hpgl-rotatey.hpgl
which produces a page like this:
![[decorative] a spiralling figure made of scaled and rotated equilateral triangles](https://scruss.com/wordpress/wp-content/uploads/2025/04/20250408_214147_BRWD89C6730425A_000572a-787x1024.jpg)
full page scan of that HP-GL file as printed on a Brother MFC-L2750DW HP-GL/2, on mono lasers at least, has some differences to the version used on plotters. The biggest difference is that there’s just one pen. You can change the pattern and line attributes of this pen, but you don’t get to change to multiple pens with different colours.
The manual for Brother’s HP-GL implementation lives here: Chapter 4: HP-GL/2 Graphics Language. Happy plotting!
-
SparkFun Retired Products Archive Reference
In late 2024, SparkFun Electronics relaunched their website. In doing so, they deleted roughly 20 years of archived product information, along with all associated datasheets, schematics and tutorials. Luckily, the Internet Archive’s Wayback Machine has good records of the site, and I was able to recover links to 5934 deleted products.
So here’s the list: SparkFun Retired Products Archive Reference.
-
Snow-loving Solar Marble Machine
Martin Raynsford / Solarbotics Solar Marble Machine loving glare off deep snow Still going strong after more than a decade in the front window, the Solar Marble Machine has been running flat out all day because of the glare from the deep snow outside. It might normally do one click a day, if any at all.
-
MicroPython Benchmarks
Somewhat predictably, my Parallel MicroPython Benchmarking thing got out of hand, and I’ve been scrabbling around jamming the benchmark code on every MicroPython board I can find.
So despite WordPress’s best efforts in thwarting me from having a table here, my results are as follows, from fastest to slowest:
Board Interpreter CPU @ Frequency / MHz Time / s DevEBox STM32H7xx micropython 1.20.0 STM32H743VIT6 @ 400 3.7 Metro M7 micropython 1.24.1 MIMXRT1011DAE5A @ 500 4.3 S3 PRO micropython 1.25.0.preview ESP32S3 @ 240 8.9 Raspberry Pi Pico 2 W micropython 1.25.0.preview RP2350 @ 150 10.3 ItsyBitsy M4 Express micropython 1.24.1 SAMD51G19A @ 120 12.3 pyboard v1.1 micropython 1.24.1 STM32F405RG @ 168 13.0 C3 mini micropython 1.25.0.preview ESP32-C3FH4 @ 160 13.2 HUZZAH32 – ESP32 micropython 1.24.1 ESP32 @ 160 15.4 S2 mini micropython 1.25.0.preview ESP32-S2FN4R2 @ 160 17.4 Raspberry Pi Pico W micropython 1.24.1 RP2040 @ 125 19.8 WeAct BlackPill STM32F411CEU6 micropython 1.24.0.preview STM32F411CE @ 96 21.4 W600-PICO micropython 1.25.0.preview W600-B8 @ 80 30.7 LOLIN D1 mini micropython 1.24.1 ESP8266 @ 80 45.6 Yes, I was very surprised that the DevEBox STM32H7 at 400 MHz was faster than the 500 MHz MIMXRT1011 in the Metro M7. What was even more impressive is that the STM32H7 board was doing all the calculations in double precision, while all the others were working in single.
As for the other boards, the ESP32 variants performed solidly, but the ESP8266 in last place should be retired. The Raspberry Pi Pico 2 W was fairly nippy, but the original Raspberry Pi Pico is still a lowly Cortex-M0+, no matter how fast you clock it. The STM32F4 boards were slower than I expected them to be, frankly. And yay! to the plucky little W600: it comes in second last, but it’s the cheapest thing out there.
All of these benchmarks were made with the same code, but with two lines changed:
- The I2C specification, which is a minor syntax change for each board;
- The input trigger pin. Some boards like these as numbers, some take them as strings. Pro tip for W600 users: don’t use D0 for an input that’s tied to ground, unless you want the board to go into bootloader mode …
I’d hoped to run these tests on the SAMD21 little micro-controllers (typically 48 MHz Cortex-M0), but they don’t have enough memory for MicroPython’s framebuf module, so it’s omitted from the build. They would likely have been very slow, though.
In the spirit of fairness, I also benchmarked CircuitPython on a Arduino Nano RP2040 Connect, which has the same processor as a Raspberry Pi Pico:
Board Interpreter CPU @ Frequency / MHz Time / s Arduino Nano RP2040 Connect circuitpython 9.2.3 RP2040 @ 125 18.0 So it’s about 10% quicker than MicroPython, but I had to muck around for ages fighting with CircuitPython’s all-over-the-shop documentation and ninny syntax changes. For those that like that sort of thing, I guess that’s the sort of thing they like.
-
The 100 Doors Problem, on a very small computer
The 100 Doors problem running on an (emulated) unexpanded ZX81 I learned about this simple computer problem from Michael Doornbos: Just for fun, the 100 door problem on several different systems
Yeah, it’s pretty neat to be able to do that on a Commodore VIC-20 with 5K of RAM. But how about a ZX81 with only 1K? With screen memory that moves around depending on how much stuff you have on the screen? No problem:

that’s it: that’s the whole program The tricky part is printing just enough to the screen that you have enough memory to store the array and still have enough memory for your program. I did that by printing four lines of “🮐” characters (CHR$ 136 on the ZX81, U+1FB90) and moving the cursor down just far enough that later output wouldn’t zap my data. The screen address (given by the D_FILE pointer at 16396) is used as an array of 100 characters.
The ZX81’s (non-ASCII) character set has a nice quirk that Space is CHR$ 0, and inverse video Space (“█”) is at CHR$ 128. So you can use NOT to toggle the value.
Here’s the program listing, with Unicode characters:
10 REM 100DOORS1K SCRUSS 2025 20 FOR I=1 TO 128 30 PRINT "🮐"; 40 NEXT I 50 PRINT AT 3,0;"🮐" 60 LET D=PEEK 16396+PEEK 16397*256 70 FOR J=1 TO 100 80 POKE D+J,0 90 NEXT J 100 FOR I=1 TO 100 110 FOR J=I TO 100 STEP I 120 POKE D+J,128*NOT PEEK (D+J) 130 NEXT J 140 NEXT I 150 FOR I=1 TO 100 160 IF PEEK (D+I) THEN PRINT I, 170 NEXT I
The ZX81 program image plus the listing in zmakebas format is included here:
-
Parallel MicroPython Benchmarking
On the left, a Raspberry Pi Pico 2W. On the right, a Raspberry Pi Pico. Each is connected to its own small OLED screen. When a button is pressed, both boards calculate and display the Mandelbrot set, along with its completion time. Needless to say, the Pico 2 W is quite a bit quicker. 
the before screens … 
Pico 2 comes in at 10.3 seconds, original Pico at 19.8 seconds Stuff I found out setting this up:
- some old OLEDs, like these surplus pulse oximeter ones, don’t have pull-up resistors on their data lines. These I’ve carefully hidden behind the displays, but they’re there.
- Some MicroPython ports don’t include the complex type, so I had to lose the elegant z→z²+C mapping to some ugly code.
- Some MicroPython ports don’t have os.uname(), but sys.implementation seems to cover most of the data I need.
- On some boards, machine.freq() is an integer value representing the CPU frequency. On others, it’s a list. Aargh.
These displays came from the collection of the late Tom Luff, a Toronto maker who passed away late 2024 after a long illness. Tom had a huge component collection, and my way of remembering him is to show off his stuff being used.
Source:
# benchmark Mandelbrot set (aka Brooks-Matelski set) on OLED # scruss, 2025-01 # MicroPython # -*- coding: utf-8 -*- from machine import Pin, I2C, idle, reset, freq # from os import uname from sys import implementation from ssd1306 import SSD1306_I2C from time import ticks_ms, ticks_diff # %%% These are the only things you should edit %%% startpin = 16 # pin for trigger configured with external pulldown # I2C connection for display i2c = machine.I2C(1, freq=400000, scl=19, sda=18, timeout=50000) # %%% Stop editing here - I mean it!!!1! %%% # maps value between istart..istop to range ostart..ostop def valmap(value, istart, istop, ostart, ostop): return ostart + (ostop - ostart) * ( (value - istart) / (istop - istart) ) WIDTH = 128 HEIGHT = 64 TEXTSIZE = 8 # 16x8 text chars maxit = 120 # DO NOT CHANGE! # value of 120 gives roughly 10 second run time for Pico 2W # get some information about the board # thanks to projectgus for the sys.implementation tip if type(freq()) is int: f_mhz = freq() // 1_000_000 else: # STM32 has freq return a tuple f_mhz = freq()[0] // 1_000_000 sys_id = ( implementation.name, ".".join([str(x) for x in implementation.version]).rstrip( "." ), # version implementation._machine.split()[-1], # processor "%d MHz" % (f_mhz), # frequency "%d*%d; %d" % (WIDTH, HEIGHT, maxit), # run parameters ) p = Pin(startpin, Pin.IN) # displays I have are yellow/blue, have no pull-up resistors # and have a confusing I2C address on the silkscreen oled = SSD1306_I2C(WIDTH, HEIGHT, i2c) oled.contrast(31) oled.fill(0) # display system info ypos = (HEIGHT - TEXTSIZE * len(sys_id)) // 2 for s in sys_id: ts = s[: WIDTH // TEXTSIZE] xpos = (WIDTH - TEXTSIZE * len(ts)) // 2 oled.text(ts, xpos, ypos) ypos = ypos + TEXTSIZE oled.show() while p.value() == 0: # wait for button press idle() oled.fill(0) oled.show() start = ticks_ms() # NB: oled.pixel() is *slow*, so only refresh once per row for y in range(HEIGHT): # complex range reversed because display axes wrong way up cc = valmap(float(y + 1), 1.0, float(HEIGHT), 1.2, -1.2) for x in range(WIDTH): cr = valmap(float(x + 1), 1.0, float(WIDTH), -2.8, 2.0) # can't use complex type as small boards don't have it dammit) zr = 0.0 zc = 0.0 for k in range(maxit): t = zr zr = zr * zr - zc * zc + cr zc = 2 * t * zc + cc if zr * zr + zc * zc > 4.0: oled.pixel(x, y, k % 2) # set pixel if escaped break oled.show() elapsed = ticks_diff(ticks_ms(), start) / 1000 elapsed_str = "%.1f s" % elapsed # oled.text(" " * len(elapsed_str), 0, HEIGHT - TEXTSIZE) oled.rect( 0, HEIGHT - TEXTSIZE, TEXTSIZE * len(elapsed_str), TEXTSIZE, 0, True ) oled.text(elapsed_str, 0, HEIGHT - TEXTSIZE) oled.show() # we're done, so clear screen and reset after the button is pressed while p.value() == 0: idle() oled.fill(0) oled.show() reset()(also here: benchmark Mandelbrot set (aka Brooks-Matelski set) on OLED – MicroPython)
I will add more tests as I get to wiring up the boards. I have so many (too many?) MicroPython boards!
Results are here: MicroPython Benchmarks
-
Trumpeter swan got harmonics

Isolated Trumpeter swan «parp» call, recorded at Bluffer’s Park, Toronto at 2025-01-09, 13:41 via Merlin app on Google Pixel 8 -
BASIC-52 on tiny CH552 boards via Linux
draft post, published for usefulness not polish
- Hackaday project that introduced me to the CH552 and BASIC-52: Single Chip Computer | Hackaday.io
- Boards that I’ve got this working with:
- CH552 Stick from DeqingSun/ch55xduino (DIY, surface-mount);
- WeAct Studio CH552T Mini Core Board;
- WAVGAT CH552G core board.
- You’ll need an external USB UART with 5 V power, as this port doesn’t support serial over the USB
- Project source (yes, it’s a Google Drive link, and any docs are in Japanese): CH55x. If that doesn’t work, the original redirect is from CH552Eでモニタプログラムを動かしてみました | きょうのかんぱぱ. If neither of those work, here’s my download of the archive: CH552T&G-20240805T141304Z-001.zip
- Binary file (zip): basic52s.bin (hiyodori5, version 7th May 2023, converted from hex so you don’t have to mess with srec_cat or makebin)
- Build cjacker/ch55x-isptool to upload the code (which doesn’t accept hex)
- Plug in the CH552 board. You may have to do something with the boot/reset button to make it turn up as the right USB ID (4348:55e0 WinChipHead).
- Program the board:
sudo ch55xisptool basic52s.bin - Disconnect the board, and wire it up to the USB UART (5 V, GND, TX → RXD [P3.0], RX → TXD [P3.1])
- Hit return a few times to get a prompt
- PWM is on P1.2, INT1 is on P3.3. See Hackaday project to see how to access I²C, and also do things with SFR values using RDSFR / WRSFR. PORT3 is at SFR(0B0H)
please ignore the following for now …
Who wouldn’t want to run a solid BASIC interpreter on a $3 development board? So maybe there are a couple of drawbacks:
- there’s no way to save the program to non-volatile storage: you have to be connected through a serial terminal at all times; and
- you’ve got about 600 bytes for the whole program, with no way to expand it.
Despite these limitations, there’s some futile fun to be had. I’ll show you how to flash BASIC-52 onto one of these development boards, and give a quick intro to what you can do with it.
BASIC-52
Intel released the first version of BASIC-52 for their 8051 family of microcontrollers in 1984. They produced a chip (8052AH-BASIC) with the interpreter burnt into mask ROM in 1985. The source code was released into the public domain, and various features such as I²C support were added by the community around 2000.
As befits an embedded language, BASIC-52 supports pin management, timers and interrupts. It’s also a fairly full-featured BASIC interpreter with floating point support and mostly familiar keywords and functions. Because it’s designed for very limited memory use, its string handling is quite unlike any other BASIC dialect. It has one character array that you can treat as a string, and a few functions to work with characters, but that’s about all.
A most useful reference is Intel’s MCS BASIC-52 Versions 1 & 1.1 Operating and Reference Manual. Another helpful guide is Jan Axelson’s The Microcontroller Idea Book. I found out about both of these references from Single Chip Computer — Hackaday.io, which also introduced me the possibilities of running BASIC-52 on the CH552.
CH552

Deqing Sun’s CH552 Stick, from the ch55xduino project You might know WCH (aka QinHeng Electronics) from their inexpensive CH341 USB serial adapters and other interface boards. What you might not realize is that all of their older interface chips are based on an optimized 8051 design
-
Raccoon kit dojo
We were visited by four small raccoons this morning, who decided to practice their judo moves on the back deck.













































-
Cheap NeoPixels at the Dollar Store
Exhibit A:

also known as “Monster BASICS Sound reactive RGB+IC Color Flow LED strip”. It’s $5 or so at Dollarama, and includes a USB cable for power and a remote control. It’s two metres long and includes 60 RGB LEDs. Are these really super-cheap NeoPixel clones?
I’m going to keep the USB power so I can power it from a power bank, but otherwise convert it to a string of smart LEDs. We lose the remote control capability.
Pull back the heatshrink at the USB end:

… and there are our connectors. We want to disconnect the blue Din (Data In) line from the built in controller, and solder new wires to Din and GND to run from a microcontroller board.
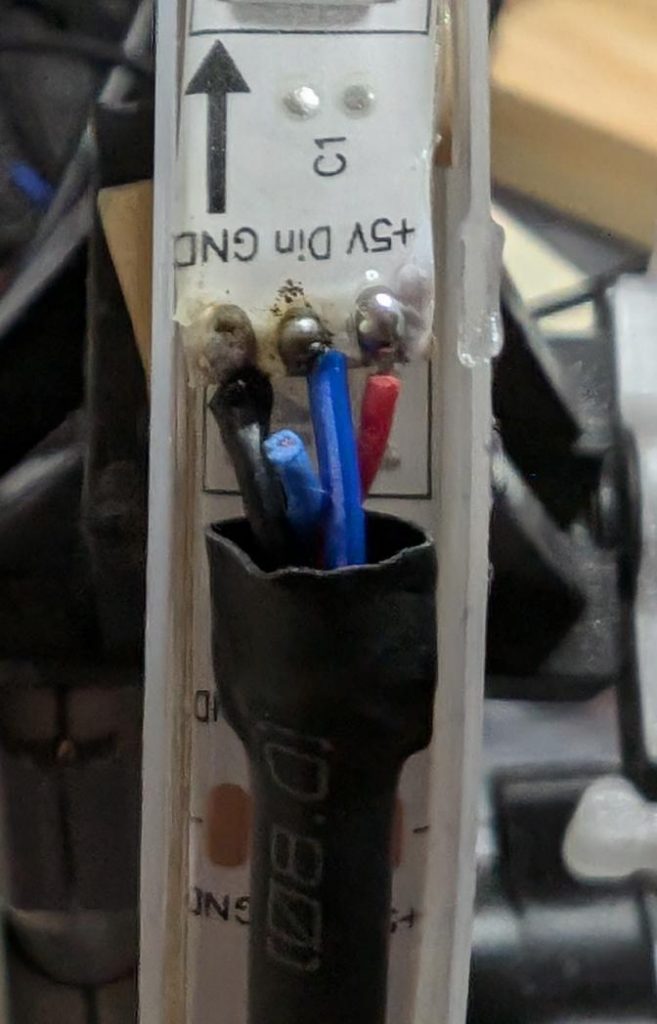
Maybe not the best solder job, but there are new wires feeding through the heatshrink and soldered onto the strip.

Here’s the heatshrink pushed back, and everything secured with a cable tie.
Now to feed it from standard MicroPython NeoPixel code, suitably jazzed up for 60 pixels.

A pretty decent result for $5!
-
Brother Canada laser cartridge return label
April 2025: got a slightly different label, so maybe use this:
So you bought that Brother laser printer like everyone told you to. And now it’s out of toner, so you replaced the cartridge. If you were in the USA, you could return the cartridge for free using the included label. But in Canada … it’s a whole deal including registering with Brother and giving away your contact details and, and, and …
I’m pretty sure this is a generic label, since:
- the file is dated sometime in 2023, and wasn’t generated directly for my download;
- I got a different tracking number when I handed the thing in at the post office.
But if they do complain, you know what to do: brother.ca/en/environment
-
Thousand Days: Concept
reference copy: Thousand Days: Concept on github.
Stewart Russell – scruss.com — 2024-03-26, at age 19999 days …
Summary
One’s thousand day(s) celebration occurs every thousand days of a person’s life. They are meant to be a recognition of getting this far, and are celebrated at the person’s own discretion.
Who is this for?
- Maybe your birthday’s on a day associated with an unpleasant event. Your thousand day will never coincide with your birthday.
- Maybe your birthday’s in the middle of winter, or in another part of the year that you’re not keen on. Your thousand day is every 2 years and 3 seasons, so it shifts back by a season every time it happens.
Quantities and scale
1000 days is approximately:
- 2.738 years
- 2 years 269 days
- 2 years 8.85 months
- 2 years, 3 seasons.
4000 days is just shy of 11 years.
Disadvantages
Compared to regular birthdays, thousand days:
- must be calculated; they’re not intuitive when they’re going to happen. But we have computers and calendar reminders for that …
- can be used to work out your actual date of birth, if someone knows that you’re going to be x000 days old on a particular day. It’s possible to know someone’s birthday, but not know their age.
Implementations
Web
My ancient Your 1000 Day Birthday Calculator, first published in 2002 and untouched since 2010.
Shell
So it turns out that GNU date can handle arbitrary date maths quite well. For example:
date --iso-8601=date --date="1996-11-09 + 10000 days"
returns 2024-03-27.
Other Ways
Excel or any other spreadsheet will do, too. Although not for too many years back
People with the same thousand day as you
This is an idea for finding people who have a thousand day on the same day as you. I suggest using 1851-10-01 as a datum, because:
- nothing particularly interesting happened that day;
- it’s conveniently 43000 days before my birthday.
then calculate
( (birth_date - 1851-10-01) mod 1000 ) + 1
This results in a number 1 – 1000. Everyone with the same number shares a 1000 day birthday with you.
Why not 0 – 999?
- No-one deserves to be a zero;
- Wouldn’t be much of a thousand day if it only went up to 999, would it?
Incomplete list of people with day = 1
There are more, but these were found from Wikipedia’s year pages
- Momo Hirai, born 1996-11-09 (-10000 days)
- Memphis Depay, born 1994-02-13 (-9000 days)
- Mikhail Surenovich Aloyan, born 1988-08-23 (-7000 days)
- Segundo Cernadas, born 1972-03-20 (-1000 days)
- Sissel Kyrkjebø, born 1969-06-24 (0 days)
- Maria Canals-Barrera, born 1966-09-28 (+1000 days)
- Pernell Whitaker, born 1964-01-02 (+2000 days)
- [DONDI](https://en.wikipedia.org/wiki/Dondi_(graffiti_artist%29), born 1961-04-07 (+3000 days)
- Richard Legendre, born 1953-01-19 (+6000 days)
- Arnold Schwarzenegger, born 1947-07-30 (+8000 days)
- Keith Emerson, born 1944-11-02 (+9000 days)
- Harvey Keitel, born 1939-05-13 (+11000 days)
- Agnès Varda, born 1928-05-30 (+15000 days)
- Shoista Mullojonova, born 1925-09-03 (+16000 days)
- Lucian Freud, born 1922-12-08 (+17000 days)
- Huang Feili, born 1917-06-17 (+19000 days)
- Kikuko, Princess Takamatsu, born 1911-12-26 (+21000 days)
- Walter O’Malley, born 1903-10-09 (+24000 days)
- León de Greiff, born 1895-07-22 (+27000 days)
- Geoffrey Fisher, born 1887-05-05 (+30000 days)
- Sara Teasdale, born 1884-08-08 (+31000 days)
- Lee de Forest, born 1873-08-26 (+35000 days)
- Carl Nielsen, born 1865-06-09 (+38000 days)
Licence
🅭 2024, Stewart Russell, scruss.com
This work is licensed under CC BY-SA 4.0.
There are no trademarks, patents, official websites, social media or official anythings attached to this concept. Please take the idea and do good with it.
So why aren’t you implementing this further?
I’ve had this idea kicking around my head for at least the last 20 years. For $REASONS, it turns out I’m not very good at implementing stuff. I’d far rather someone else took this idea and ran with it than let it sit undeveloped.
-
Crickets in February
It’s mid-February in Toronto: -10 °C and snowy. The memory of chirping summer fields is dim. But in my heart there is always a cricket-loud meadow.
Short of moving somewhere warmer, I’m going to have to make my own midwinter crickets. I have micro-controllers and tiny speakers: how hard can this be?
more fun than a bucket of simulated crickets
(video description: a plastic box containing three USB power banks, each with USB cable leading to a Raspberry Pi Pico board. Each board has a small electromagnetic speaker attached between ground and a data pin)I could have merely made these beep away at a fixed rate, but I know that real crickets tend to chirp faster as the day grows warmer. This relationship is frequently referred to as Dolbear’s law. The American inventor Amos Dolbear published his observation (without data or species identification) in The American Naturalist in 1897: The Cricket as a Thermometer —
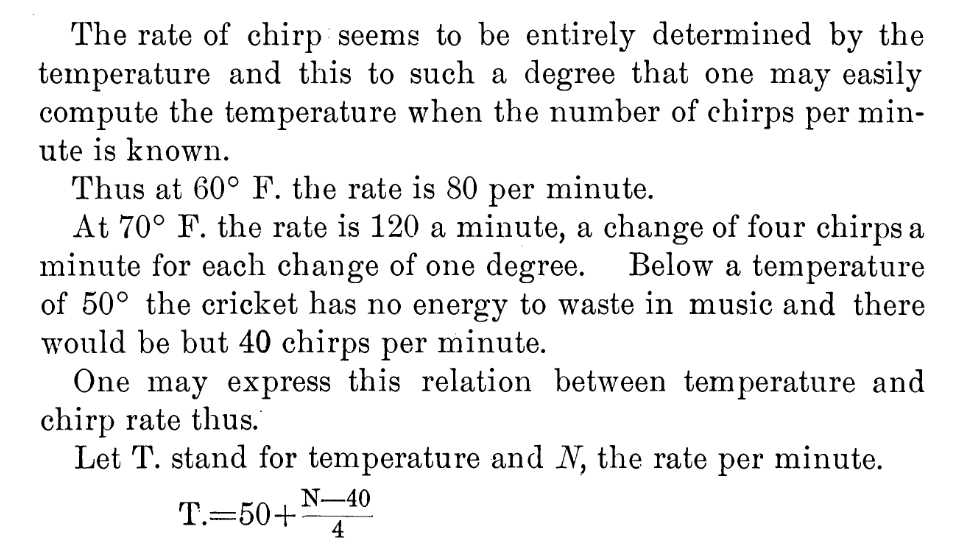
pretty bold assertions there without data eh, Amos old son …? When emulating crickets I’m less interested in the rate of chirps per minute, but rather in the period between chirps. I could also care entirely less about barbarian units, so I reformulated it in °C (t) and milliseconds (p):
t = ⅑ × (40 + 75000 ÷ p)
Since I know that the micro-controller has an internal temperature sensor, I’m particularly interested in the inverse relationship:
p = 15000 ÷ (9 * t ÷ 5 – 8)
I can check this against one of Dolbear’s observations for 70°F (= 21⅑ °C, or 190/9) and 120 chirps / minute (= 2 Hz, or a period of 500 ms):
p = 15000 ÷ (9 * t ÷ 5 – 8)
= 15000 ÷ (9 * (190 ÷ 9) ÷ 5 – 8)
= 15000 ÷ (190 ÷ 5 – 8)
= 15000 ÷ 30
= 500Now I’ve got the timing worked out, how about the chirp sound. From a couple of recordings of cricket meadows I’ve made over the years, I observed:
- The total duration of a chirp is about ⅛ s
- A chirp is made up of four distinct events:
- a quieter short tone;
- a longer louder tone of a fractionally higher pitch;
- the same longer louder tone repeated;
- the first short tone repeated
- There is a very short silence between each tone
- Each cricket appears to chirp at roughly the same pitch: some slightly lower, some slightly higher
- The pitch of the tones is in the range 4500–5000 Hz: around D8 on the music scale
I didn’t attempt to model the actual stridulating mechanism of a particular species of cricket. I made what sounded sort of right to me. Hey, if Amos Dolbear could make stuff up and get it accepted as a “law”, I can at least get away with pulse width modulation and tiny tinny speakers …
This is the profile I came up with:
- 21 ms of 4568 Hz at 25% duty cycle
- 7 ms of silence
- 28 ms of 4824 Hz at 50% duty cycle
- 7 ms of silence
- 28 ms of 4824 Hz at 50% duty cycle
- 7 ms of silence
- 21 ms of 4568 Hz at 25% duty cycle
- 7 ms of silence
That’s a total of 126 ms, or ⅛ish seconds. In the code I made each instance play at a randomly-selected relative pitch of ±200 Hz on the above numbers.
For the speaker, I have a bunch of cheap PC motherboard beepers. They have a Dupont header that spans four pins on a Raspberry Pi Pico header, so if you put one on the ground pin at pin 23, the output will be connected to pin 26, aka GPIO 20:

from a post where I did a very, very bad thing: Nyan Cat, except it gets faster — RTTTL on the Raspberry Pi Pico So — finally — here’s the MicroPython code:
# cricket thermometer simulator - scruss, 2024-02 # uses a buzzer on GPIO 20 to make cricket(ish) noises # MicroPython - for Raspberry Pi Pico # -*- coding: utf-8 -*- from machine import Pin, PWM, ADC, freq from time import sleep_ms, ticks_ms, ticks_diff from random import seed, randrange freq(125000000) # use default CPU freq seed() # start with a truly random seed pwm_out = PWM(Pin(20), freq=10, duty_u16=0) # can't do freq=0 led = Pin("LED", Pin.OUT) sensor_temp = machine.ADC(4) # adc channel for internal temperature TOO_COLD = 10.0 # crickets don't chirp below 10 °C (allegedly) temps = [] # for smoothing out temperature sensor noise personal_freq_delta = randrange(400) - 199 # different pitch every time chirp_data = [ # cadence, duty_u16, freq # there is a cadence=1 silence after each of these [3, 16384, 4568 + personal_freq_delta], [4, 32768, 4824 + personal_freq_delta], [4, 32768, 4824 + personal_freq_delta], [3, 16384, 4568 + personal_freq_delta], ] cadence_ms = 7 # length multiplier for playback def chirp_period_ms(t_c): # for a given temperature t_c (in °C), returns the # estimated cricket chirp period in milliseconds. # # Based on # Dolbear, Amos (1897). "The cricket as a thermometer". # The American Naturalist. 31 (371): 970–971. doi:10.1086/276739 # # The inverse function is: # t_c = (75000 / chirp_period_ms + 40) / 9 return int(15000 / (9 * t_c / 5 - 8)) def internal_temperature(temp_adc): # see pico-micropython-examples / adc / temperature.py return ( 27 - ((temp_adc.read_u16() * (3.3 / (65535))) - 0.706) / 0.001721 ) def chirp(pwm_channel): for peep in chirp_data: pwm_channel.freq(peep[2]) pwm_channel.duty_u16(peep[1]) sleep_ms(cadence_ms * peep[0]) # short silence pwm_channel.duty_u16(0) pwm_channel.freq(10) sleep_ms(cadence_ms) led.value(0) # led off at start; blinks if chirping ### Start: pause a random amount (less than 2 s) before starting sleep_ms(randrange(2000)) while True: loop_start_ms = ticks_ms() sleep_ms(5) # tiny delay to stop the main loop from thrashing temps.append(internal_temperature(sensor_temp)) if len(temps) > 5: temps = temps[1:] avg_temp = sum(temps) / len(temps) if avg_temp >= TOO_COLD: led.value(1) loop_period_ms = chirp_period_ms(avg_temp) chirp(pwm_out) led.value(0) loop_elapsed_ms = ticks_diff(ticks_ms(), loop_start_ms) sleep_ms(loop_period_ms - loop_elapsed_ms)There are a few more details in the code that I haven’t covered here:
- The program pauses for a short random time on starting. This is to ensure that if you power up a bunch of these at the same time, they don’t start exactly synchronized
- The Raspberry Pi Pico’s temperature sensor can be slightly noisy, so the chirping frequency is based on the average of (up to) the last five readings
- There’s no chirping below 10 °C, because Amos Dolbear said so
- The built-in LED also flashes if the board is chirping. It doesn’t mimic the speaker’s PWM cadence, though.
Before I show you the next video, I need to say: no real crickets were harmed in the making of this post. I took the bucket outside (roughly -5 °C) and the “crickets” stopped chirping as they cooled down. Don’t worry, they started back up chirping again when I took them inside.
“If You’re Cold They’re Cold, Bring Them Inside”
(video description: a plastic box containing three USB power banks, each with USB cable leading to a Raspberry Pi Pico board. Each board has a small electromagnetic speaker attached between ground and a data pin)