Instagram filter used: Lo-fi
The Raspberry Pi’s hardware and software support has come a long way in the few months it has been in the wild. I first tried this application in the summer, and the results were dismal. Now, thanks much improved USB driver support under Raspbian, I’m pleased to say it works flawlessly.
Earlier this year, I bought a turntable (ack!) for transferring vinyl to mp3. I have a TC-772 USB phono preamp, which spits out a 48 kHz stereo audio stream. If you plug the USB output of the preamp into a Rapberry Pi (running Raspbian Wheezy with all the updates), it’s instantly recognized as an audio device:
$ lsusb Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 002: ID 0424:9512 Standard Microsystems Corp. Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. Bus 001 Device 004: ID 08bb:2902 Texas Instruments Japan PCM2902 Audio Codec
If you install the ALSA recording utilities (sudo apt-get install alsa-utils pulseaudio – this should pull in a whole bunch of necessary packages), you can record directly from this device with the following command:
arecord -D 'pulse' -V stereo -c 2 -f dat -d 900 out.wav
which records from the ‘pulse’ audio device, displaying a stereo text VU meter (handy for setting levels), writing to a two channel 16-bit 48 kHz file called ‘out.wav’ for a maximum of 900 seconds (15 minutes). arecord has a baffling number of recording source options; arecord -L will show them. ‘pulse’ was the first one I tried.
So how does it sound? Here’s a 30 second excerpt from the only single I owned for years, The Music Tapes‘ “The Television Tells Us/Freeing Song by Reindeer”: Freeing Song by Reindeer – excerpt [mp3]. I’ve saved an even smaller snippet as lossless FLAC so you can see that the waveform’s pretty clean: FreeingSongbyReindeer-tiny_excerpt [flac].
Sounds pretty good. Not quite as good as having Julian play it in your house, I’ll allow, but not bad for a first try with a $35 computer.
 Click image for sound [mp3].
Click image for sound [mp3].
That’s the rapid clatter of chopping up Kothu Roti at Amma at the end of our street. You know that tasty spicy food is imminent when you hear that sound. I’m really pleased that Amma’s back under the original management. The other proprietors just didn’t care as much about their food.
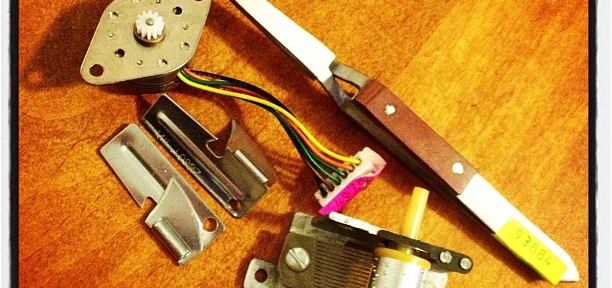
Well, this is not that: For He’s a Jolly Good Fellow [mp3], as played on this:

— an Arduino driving a stepper motor driving a Sankyo musical box. And yes, heat-shrink tubing ‘reinforced’ with dental floss doesn’t make a very robust flexible coupling.
") This looks handy; it’s the Globe Electric 2-Outlet Tap with Surge Protection and 2 USB Chargers (#46082). The USB outlets are rated at 1A. It was $12 at Loblaws. I’ll let you know how it works out for powering the Raspberry Pi.
This looks handy; it’s the Globe Electric 2-Outlet Tap with Surge Protection and 2 USB Chargers (#46082). The USB outlets are rated at 1A. It was $12 at Loblaws. I’ll let you know how it works out for powering the Raspberry Pi.
Update: Yes! It works!

Whoa! This is so old I don’t even know where to start!
 Phil sent me a note last week asking how to turn an LED on or off using Python talking through Firmata to an Arduino. This was harder than it looked.
Phil sent me a note last week asking how to turn an LED on or off using Python talking through Firmata to an Arduino. This was harder than it looked.
It turns out the hard part is getting the value from the Tkinter Checkbutton itself. It seems that some widgets don’t return values directly, so you must read the widget’s value with a get() method. This appears to work:
#!/usr/bin/python # turn an LED on/off with a Tk Checkbutton - scruss 2012/11/13 # Connection: # - small LED connected from D3, through a resistor, to GND import pyfirmata from Tkinter import * # Create a new board, specifying serial port # board = pyfirmata.Arduino('/dev/ttyACM0') # Raspberry Pi board = pyfirmata.Arduino('/dev/tty.usbmodem411') # Mac root = Tk() var = BooleanVar() # set up pins pin3 = board.get_pin('d:3:o') # D3 On/Off Output (LED) def set_led(): # set LED on/off ledval = var.get() print "Toggled", ledval pin3.write(ledval) # now set up GUI b = Checkbutton(root, text = "LED", command = set_led, variable = var) b.pack(anchor = CENTER) root.mainloop()This is explained quite well here: Tkinter Checkbutton doesn’t change my variable – Stack Overflow. I also learnt a couple of things about my previous programs:


Instagram filter used: Lo-fi
Photo taken at: Ellis Parking Structure-University of Chicago

I went to American Science and Surplus yesterday, and picked up: